V
主页
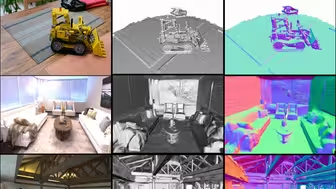
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
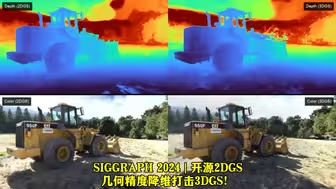
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
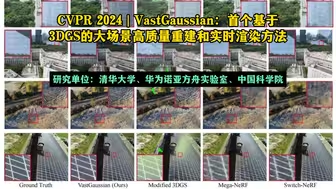
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
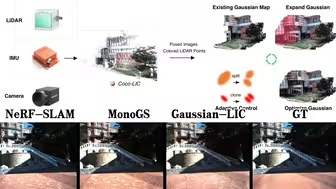
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
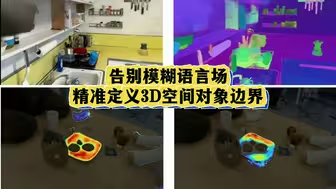
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
黑神话·悟空爆火,有哪些AI技术在助力?
超越所有SOTA!3DGS结合NeRF到4DGF 重塑动态城市场景新视图合成
来自Meta团队的SceneScript,LLM赋能“3D场景重建”,引爆你的AR/VR等应用体验,惊艳效果超越你的想象!
基于3D高斯渲染技术的高速稠密建图:SplaTAM
CVPR 2024 | 如何给NeRF开透视眼?结合医疗领域的"它"就够了
NeRF在机器人技术中 应用的最新综述,旨在为 该领域提供重要参考指南
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
ECCV'24 NVIDIA | DiPIR:堪称"变色龙",可将3D物体无缝融合进各种场景,提升视觉真实感
GaussianRPG:首个开源的基于3DGS的自动驾驶闭环仿真器(上篇)
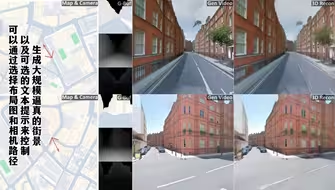
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
火爆全网的NeRF技术到底是什么黑科技,它与三维重建究竟有什么不同
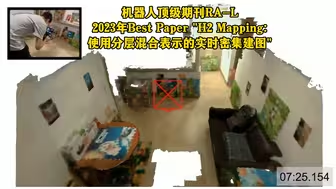
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
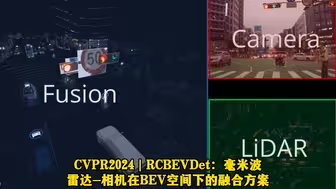
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
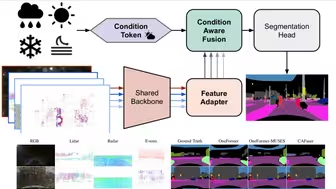
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
不受物体数量和类别限制的全方位3D分割OmniSeg3D:通过分层对比学习实现全方位3D分割
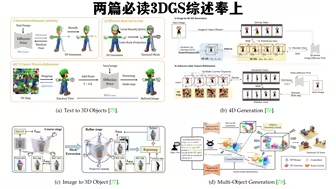
两篇与3DGS有关的综述奉上,<3DGS:调查、技术、挑战和机遇>主:<高斯分层:3D 重建与新新型视图合成>
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
StreamPETR—作分享:稀疏向量化表征长时序建模
CVPR2024 | LidaRF: 深入研究应用在街景 NeRF的激光雷达数据
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
ECCV'24 | OpenIns3D:无需2D图像的3D场景理解技术,随意处理复杂推理和文本查询
深蓝学院&元戎启行:听大佬聊自动驾驶
CVPR'24 | 视觉基础模型大一统?融合CLIP、DINOv2、SAM等,实现分类分割等任务上的SOTA性能
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
深蓝学院精品课程之NeRF基础与常见算法解析:详解什么是神经辐射场
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
【科研宣传】EVA-Gaussian: 3D Gaussian-Based Real-time Human Novel View Synthesis