V
主页
京东 11.11 红包
港科大沈劭劼组最新开源:双目事件相机视觉里程计!
发布人
港科大沈劭劼组最新开源:双目事件相机视觉里程计! 本文提出了一种双目事件相机采集数据的视觉里程计方法。实验证明了该方法在一般6自由度运动的自然场景中的通用性。作者开源了算法和数据集,以促进事件相机SLAM这一新兴主题的研究。 感兴趣的同学可以点击下方链接添加工作人员,领取海量人工智能资源,还有相关行业交流群哦 https://www.shenlanxueyuan.com/launch/B0183/detail
打开封面
下载高清视频
观看高清视频
视频下载器
果蝇无人机?用翅膀飞起来的无人机来了!
视觉SLAM开源代码论文带读(ORB_SLAM2)
Science Robotics 香港城市大学与香港科技大学开发了具有协同混合运动的敏捷单足跳跃四轴飞行器
视觉导航:从状态估计到运动规划
智行者SLAM专家高翔博士:室内无人车和室外无人车有什么区别?
BEVFormer一作分享,基于时空融合的BEV感知”
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
2021 高翔:视觉SLAM基础
基于3D高斯渲染技术的高速稠密建图:SplaTAM
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
薛定谔的黑洞猫:时空也能量子叠加?
端-云协同的视觉定位与重建及应用 | 章国锋
初二男生为老年痴呆外婆发明“认人”神器
【自制图传遥控器】坏消息缝合怪,好消息全缝上了
HKUST RM2025 Embedded Tutorial 4: UART & Decode
AR光波导的应用与发展 | 郑昱
轨道车辆激光LIO测试
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
天鸢·入无人之境——基于智能感知和规划的自主作业无人机系统
开着自动驾驶汽车的你能想到有多少种感知技术在为你保驾护航吗?
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
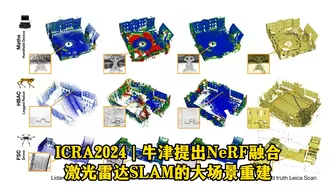
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
从Navigation2开始的ROS2生活
多模态信息感知的SLAM | 吴毅红
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
SLAM with Event-based Vision Sensors: Past, Present, and Future | 周易
面向自主移动机器人的感知和规划前沿进展 | 刘勇
端到端智能驾驶系统的优势与实现方式,以及端到端智能驾驶系统是自动驾驶的未来吗?
VIO主流框架&VINS推导解析
我是来得最早的,现在却是最小的
融合人与环境的激光雷达三维动态场景感知 | 王程
掌握NeRF(神经辐射场),实现3D场景的渲染与交互,感受更加丰富和立体的视觉体验
SLAM在机器人与自动驾驶领域的从业探讨 | 圆桌论坛
【开源】刑天10轴正式发布
动态视觉与SLAM:在线学习的途径 | 査红彬
『算法可视化』三分钟看懂梯度下降法
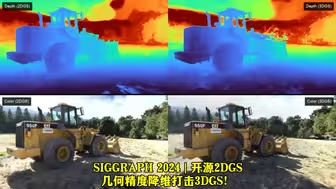
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
人工智能小知识:深度学习模型压缩技术—大白话详解模型剪枝
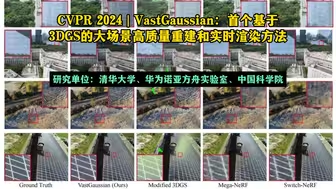
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院