V
主页
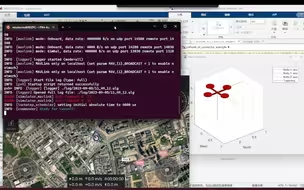
UAV虚拟碰撞传感器的交互式控制仿真
发布人
"sl3dex_uav"示例展示了如何使用虚拟碰撞传感器来交互式控制仿真,并使用Simulink(R) 3D Animation(TM)更改虚拟世界对象的外观。 该示例代表了一个简单的无人机(UAV)挑战。您的任务是穿过蓝色墙壁中的较大窗口,通过障碍物,并在蓝色着陆区的停机坪上降落。飞行时间从穿过起飞窗口的时刻开始计时,当无人机降落在停机坪上时,仿真停止。在飞行过程中,记录与障碍物柱的碰撞次数。在穿过起飞窗口之前,撞击蓝色起始墙不会产生罚款,您可以继续前往起飞窗口。 该模型使用带有SpaceMouse(R)设备的简单无人机导航。还提供了预定义的轨迹,以演示无需SpaceMouse的模型功能。 在关联的虚拟世界中,定义了四个PrimitivePickSensor节点,用于检测无人机与各种目标几何体(蓝色起始墙、起飞窗口、橙色障碍物柱和着陆停机坪)的碰撞。当激活时,这些传感器会在仿真过程中触发不同的操作-撞击起始墙只会改变墙的颜色,通过起飞窗口会开始挑战的经过时间,与障碍物的碰撞会被记录并计分,降落在停机坪上会停止仿真并将无人机旋翼叶片的视觉外观设置为静止状态。 这些碰撞是近似的-PrimitivePickSensors检测包围在无人机机身周围的透明箱体(UAV_Collision_Box)的碰撞。碰撞也不会触发任何接触力效应-您可以观察到无人机可以穿过虚拟世界对象而不会弹跳。 注:模型打开步骤:MATLAB界面上方栏的simulink打开,初始界面的【Simulink 3D Animation】中。
打开封面
下载高清视频
观看高清视频
视频下载器
WSL下的PX4-QGC-AirSim的虚拟可视化仿真
WSL下的PX4与无人机Simulink模型在环仿真的完整演示
基于Simulink的PX4飞控算法的开发实践(6.传感器硬件在环)
WSL下的PX4软件和UAV动力学模型在环仿真工作流
PX4飞控基于惯性传感器数据和Simulink模型的控制器在线开发
女孩床上被电(后续),电压异常的原因找到了,但这次是我错了。
酷!哈工大高会军教授、李湛副教授团队研发出新型矢量飞行机器人
利用Python-Flightgear实现自主飞行任务可视化
使用Pixhawk2.4.8基于Simulink进行入门级飞控算法自主开发的操作
PID控制
含有反步法+PID双控制器及风速干扰模型的无人机定点定高控制全系统Simulink模型
固定翼飞机非线性模型线性化步骤及分析(一)
四旋翼反步法控制仿真模型演示
无人机Simscape建模(二)-具体的simscape组件建模过程
无人机Simscape建模(二)-航迹规划及位姿控制梳理
Ubuntu系统下的PX4纯软件在环联合仿真
基于Simulink的PX4飞控算法的开发实践(3.硬件在环示例模型1演示继续)
合个闸怕啥?我真的怕。电这个东西,切勿大意。
电调电机校准操作演示
PX4飞控的模型在环、软件在环和硬件在环的区别
Simulink模型与Python脚本之间数据通信的实现
Flightgear-Simulink联合仿真及自定义配置机型机场的演示
飞控电机顺序测试记录
BGD团队在美国飞行
今天和国家电网的师傅一起检修电路故障,零火地都带电。
无人机组完成测试任务
WSL下利用QGC操作PX4-Gazebo仿真器完整演示
固定翼飞机非线性模型线性化步骤及分析(二)
使用 Pixhawk2.1Cube 实飞自己的控制器算法效果
Pixhawk系列硬件飞控刷写Bootload引导程序的操作
和我一起来听听飞行器de控制
容嬷嬷科普:加油枪原理
基于PX4的Simulink模型实时获取GPS导航数据
飞控算法测试过程集合
处理器在环(PIL)的代码生成及有效性验证(一)
基于Simulink的PX4飞控算法的开发实践(7.遥控器硬件在环)
女孩在家躺床上被电了,我又一次查到了变电室。
如何让我国陆军“人人有筒打”?【Top说56】国产70式/PF89单兵反坦克火箭筒发展历程(下)
IO-PWM-OUT 接线
实现动态甜甜圈效果竟然只有不到60行代码