V
主页
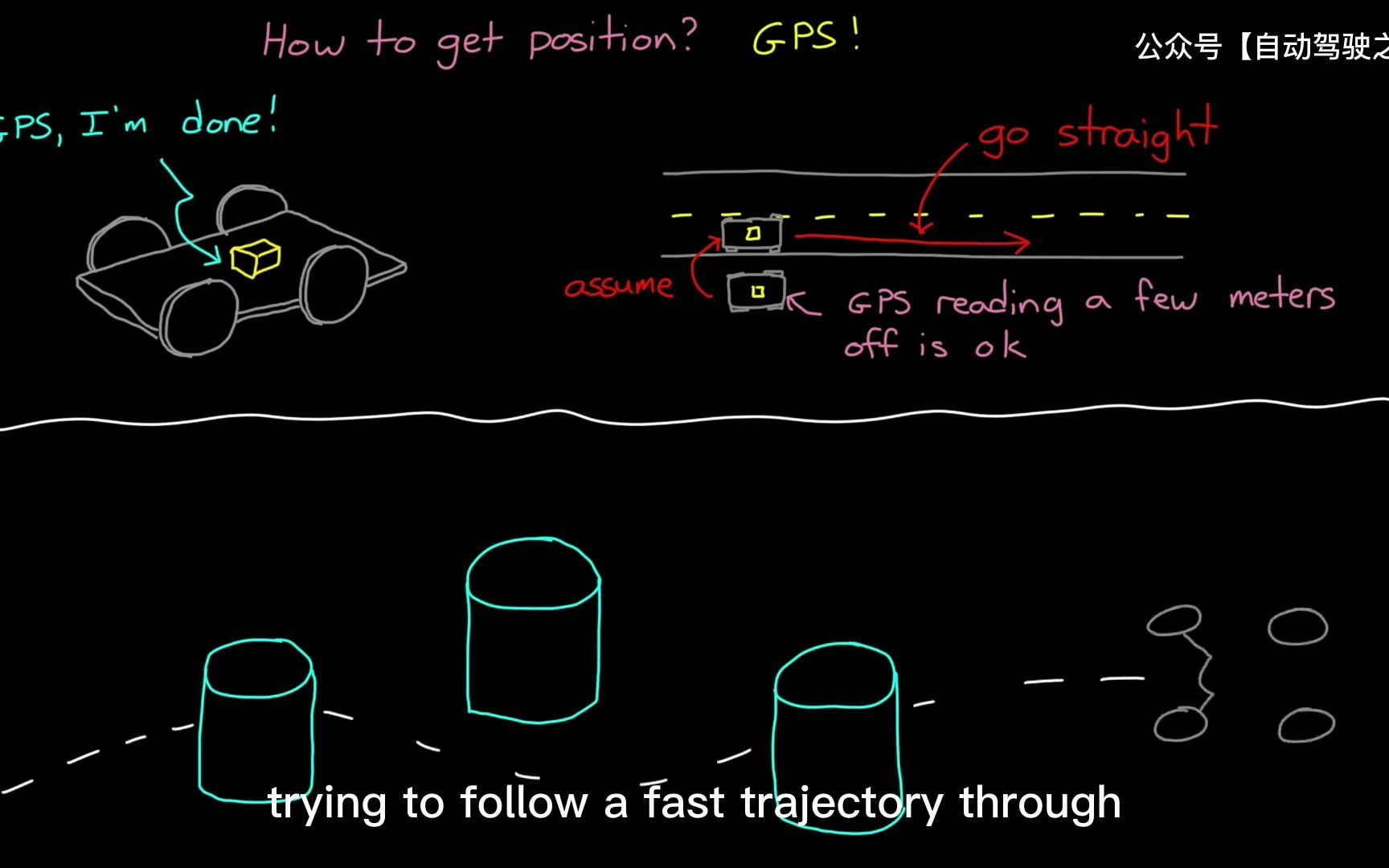
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
发布人
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
打开封面
下载高清视频
观看高清视频
视频下载器
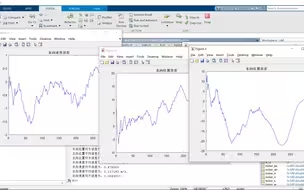
【滤波定位】基于matlab卡尔曼滤波GPS+IMU融合定位【含Matlab源码 3604期】
【传感器融合】3:如何融合GPS和IMU
IMU参数标定终于有人讲清楚了
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
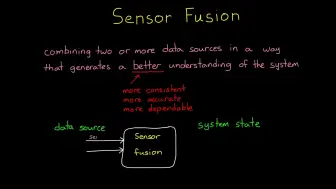
自动驾驶多传感器数据融合(1):什么是多传感器融合?
多传感器融合感知
IMU融合GPS,并用Matlab仿真
感知融合第三步:融合GPS和IMU估计姿势
激光-视觉-IMU-GPS融合SLAM系列课程-多传感器外参标定原理与代码解析
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
imu_gps_localization, imu与GPS的融合
惯性导航之如何将加速度计与GPS相结合,准确预测位置和速度
多传感器融合的本质
基于地平线视觉感知的多传感器融合定位量产方案,自动驾驶实车测试demo
GPS+IMU融合测试
IMU究竟是个啥
【开源】纯GPS定位,输出位置和方向(gnss_localizer)
自动驾驶多传感器数据融合(3):单目标跟踪算法
GPS+IMU+视觉里程计,融合定位,不惧高大建筑物干扰
中科微北斗+GPS卫星定位快速入门教程
IMU的数据为什么要滤波
基于uwb和IMU融合的三维空间定位算法matlab仿真
第8课 GPS, IMU,SLAM 传感器融合
机器人中的IMU有什么用
GPS IMU 数据融合 part one
太详细了!多传感器融合的策略和方法
大作业|激光-视觉-IMU-GPS融合SLAM算法
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
基于多源传感器融合的机器人定位与建图 | 浙江大学副教授张宇【附PPT】
自动驾驶多传感器数据融合(4):多目标跟踪算法
卡尔曼滤波算法实现多传感器信息融合做轨迹跟踪matlab
自动驾驶的多传感器数据融合技术分享
如何使用IMU来精确定位车辆和导航
多源信息融合之卡尔曼滤波
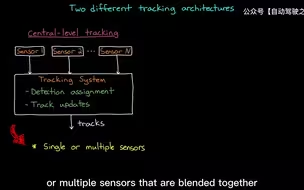
自动驾驶多传感器数据融合(5):什么是跟踪级融合?
【官方中字】了解传感器融合和跟踪 (全6P)MATLAB&Simulink
IMU进行惯性导航
使用 IMU(陀螺仪和加速度计)在 6DOF(俯仰、滚动、偏航和 x、y、z 位移)中进行步态跟踪
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
【填鸭式笔记】纯惯导数据(IMU)的姿态、位置解算探索