V
主页
新员工入职公积金缴纳需知
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
【干货分享】分享一个ComfyUI节点,可以给图片去掉像素块、噪点以及给低分辨率图片进行高清修复放大
AI 编程工具 Cursor 带来哪些机遇与挑战(20240908直播回放)
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
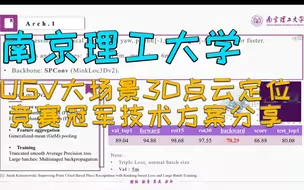
CMU & ICRA22 UGV大场景3D点云定位竞赛冠军技术方案分享|南京理工大学
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
手把手带你入门SLAM
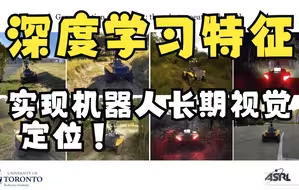
深度学习特征实现机器人长期视觉定位,白天夜里什么光照都hold住!ICRA/RAL 2022
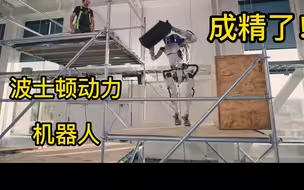
波士顿动力机器人,要成精了!
CMU等机构发布超强VSLAM数据集TartanAir,用于探索视觉SLAM极限!
【开源】ICRA2022|CMU新工作,自主勘探开发环境与规划算法
ICRA 2022盘点:SLAM方向十大重点论文解读
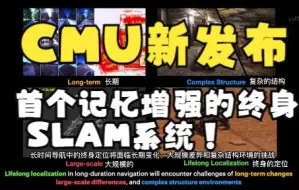
CMU最新发布首个记忆增强的终身SLAM系统,源自大脑中记忆重放机制的启发!
大疆livox-mid360定位
三维感知图像生成丨清华&微软&中科大提出GRAM方法
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
【直播回放】2022届秋招面试心路历程分享:SLAM方向
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
激光惯性SLAM学习经验分享(附论文详细解读!)
1.4 ORB-SLAM2算法框架详解
[ICRA 2024] GCM
【六哥答疑】入门视觉SLAM,需要了解什么框架?
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
【最新技术】ANYmal C 机器人自主探索地下矿井
苏黎世皇家理工等发布!带闭环稠密神经SLAM
效率提高24%,突破功率受限!机器人的室内高效三维探索!宾夕法尼亚大学最新发布
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
2022年度盘点:优秀SLAM开源方案
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
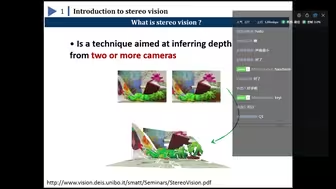
Stereo Vision——立体视觉论述+标定+校正
挖掘机技术哪家强?ETHZ即将开源自主施工挖掘机!ICRA 2022
经验分享:我的SLAM学习之路-答疑交流
哈工大发布|首个基于线特征的红外惯性里程计ETIO,性能超过了最先进的TIO!
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
【SLAM前沿讲座】CMU|用于触觉感知的因子图学习
【SLAM前沿讲座】MIT|鲁棒语义SLAM:表现和推理
这个数据集妙呀!退化环境下,也可支持热SLAM的多项研究!IROS2022
【开源】ICRA2022|基于激光雷达的终身地图构建和维护框架!
学习SLAM,必读哪些基础书籍?
这个数据集真强!地下隧道、不同照明等情况下,多机器人视觉SLAM!MIT等最新开源!
ICRA22 英特尔张益民|基于知识的自我监督持续学习-自主服务机器人之路