V
主页
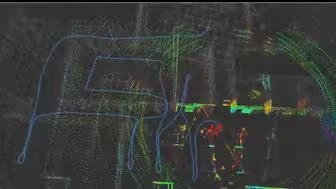
【Taurus-NAV】2D lidar+Odom+IMU Cartographer 复杂场景建图测试
发布人
【Taurus-NAV】2D lidar+Odom+IMU Cartographer 复杂场景建图测试 【硬件配置】Lidar:锐驰智光LakiBeam1、 IMU: HWT906、麦轮轮式里程计 【软件环境】Ubuntu20.04、 ROS noetic、 Cartographer 感谢@锐驰智光 提供的激光雷达LakiBeam1,后续我们也将进行更多的测试,并应用在我们比赛中的全自主机器人上。
打开封面
下载高清视频
观看高清视频
视频下载器
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
Cartographer建图测试2
自制ros建图导航机器人2
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
十年后当儿子问你RM2022的自动步兵是怎么样?
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
RM2025广工轮腿哨兵测试
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
人 机 大 战
【SLAM测试】FAST-LIO & DLO 平台测试
沉浸式体验小哨压家
RMer的工具箱
视觉:今年招新不给新生玩抽象结果玩到我头上了是吧
套件教程-FAST LIO2之点云建图
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
大疆livox-mid360定位
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
宇树 H1 升级版 自由度展示#人形机器人
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
杭州前华为首名女黑客瑾瑾 在b站坚持直播编程到凌晨 可直播间却仅1人观看
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
Taurus导航组早期驯服自动步兵日常1
CAD-Mesher: A Convenient, Accurate, Dense Mesh-based Mapping Module in SLAM for
重新正常的激光雷达扫图
【RM/雷达】全场高亮与哨兵联动罢了
SLAM100旅游景点三维建模,10分钟测完石头王国——夜郎谷,不规则造型,三维立体建模,简单易上手,大大减少了外业工作量。
每天都跑几圈,机器人底盘,室内slam
奖状收到了,希望明年奖状上面的数字能减一☝️
【第16届全国大学生智能汽车竞赛-讯飞赛道】Taurus导航组的调参日常P123
RoboMaster 视觉组培训 Section 1
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
25地面兵种新规预研