V
主页
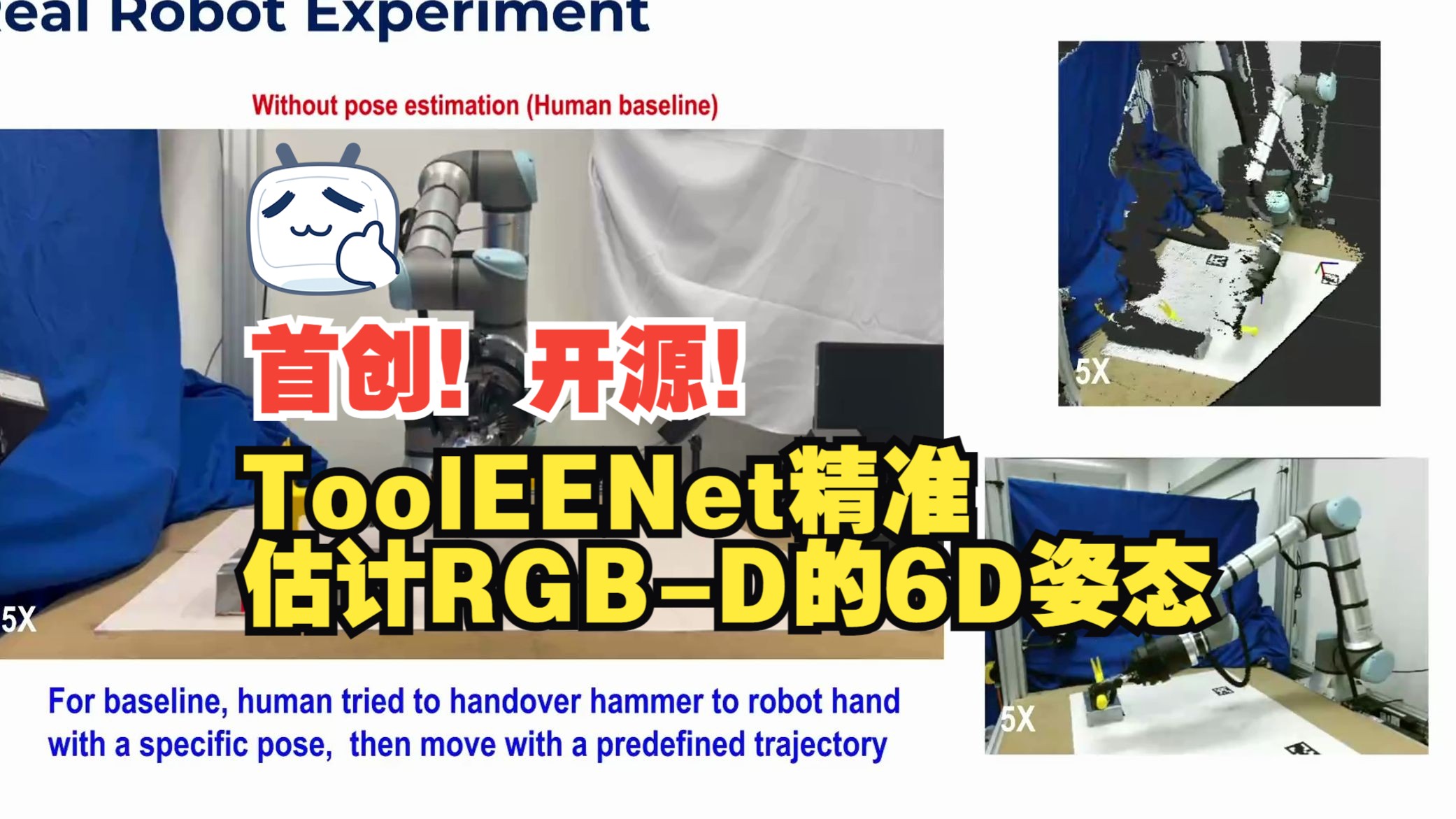
首创!开源!ToolEENet精准估计RGB-D的6D姿态
发布人
首创!开源!ToolEENet精准估计RGB-D的6D姿态 #人工智能 #算法 #计算机 #编程 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 这篇文章提出了一个框架,旨在通过RGB-D图像对机器人工具末端执行器(EE)的6D姿态进行估计。他们首先利用RGB图像获取工具和工具的EE的语义分割,然后使用分割和深度图像将观察到的点云投影到每个工具的EE点云中。接着,他们提出了一种对称感知的6D姿态表示,能够无需先验地进行6D姿态估计。通过大量实验,他们验证了自己合成的ToolEE数据集的合理性和质量,并且证明了他们的框架和姿态表示方法在数据集上优于基线方法。文章还探讨了他们方法的局限性,并提出了未来工作的方向,包括增加3D模型资产的多样性,扩展数据集,并在真实机器人上进行更多任务的实验。@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
李飞飞团队重磅开源ReKep:万能具身机器人!实时交互,还可搭载GPT-4o!
当3DGS遇上可泛化物体位姿估计
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
【整合包】免费AI一键抠图,细到发丝轻松扣除,不吃配置还可批量处理。
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
搞SLAM算法为什么要学李群和李代数
无脑写出高级,最新头条AI玩法保姆级教程,模仿大v写作手法,指令升级、
IEEE'24 | 缩短1倍!南开最新基于动态拓扑图的多无人机探索框架!
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
2024年超好用的九大AI工具!免费且强大!(下集)
具身智能势不可挡GRUtopia首个城市级具身智能仿真平台“浦源·桃源”
现在技术直播都没有人看了吗
为什么说Shodan最可怕的搜索引擎
斯坦福团队EquiBot:仅用 5 分钟演示,机器人就能学会日常操作
无需 GPS:语义地图引领多机器人室内外探索
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
SLAM中的位姿估计量为什么用转移矩阵T表示
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
【附源码】30个C++ Qt实战项目合集,七天练完,练完即可就业~练手/项目经验/毕设
全网最全即插即用模块 GitHub开源了
【Neuro/Vedal】赛博父女因为过滤器问题大打出手
四旋翼无人机-PX4控制算法代码
【C语言/C++】生日烟花代码!不会还有学计算机的同学不会用生日代码给惊喜吧?
绝对是B站最明白的达芬奇RGB混合器总结!
金字塔扩散模型:高效生成精细3D大场景!
BEV&Occ提升颗粒度的方案
中科院最新CityGaussian:VRAR时代的城市重建新标杆
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
CVPR'24 奔驰DualAD解耦动态和静态世界实现端到端驾驶!
拉爆StreetGS!60Hz计算全部动态物体!OmniRe:城市3D场景重建的最新框架!
【AI绘画】全网最强超详细AI生成视频教程,图片秒变视频!掌握自媒体流量密码!(必备的一键启动包)
AI又进化?能实时捕捉表情换脸了?!!
你最庆幸自己读过那本书!那么一定是这本!
传感器与遥控器校准原理
四旋翼模型与控制基础
AI无代码时代: 解析replit和wordware,普通人将取代专业程序员?
研一刚入学,从未接触过神经网络python也是才开始学,现在导师要我做LSTM,我应该去学什么?
ICRA2020,卡内基梅隆大学机器人研究所,基于三维子图显著性的水下环境主动SLAM探测应用