V
主页
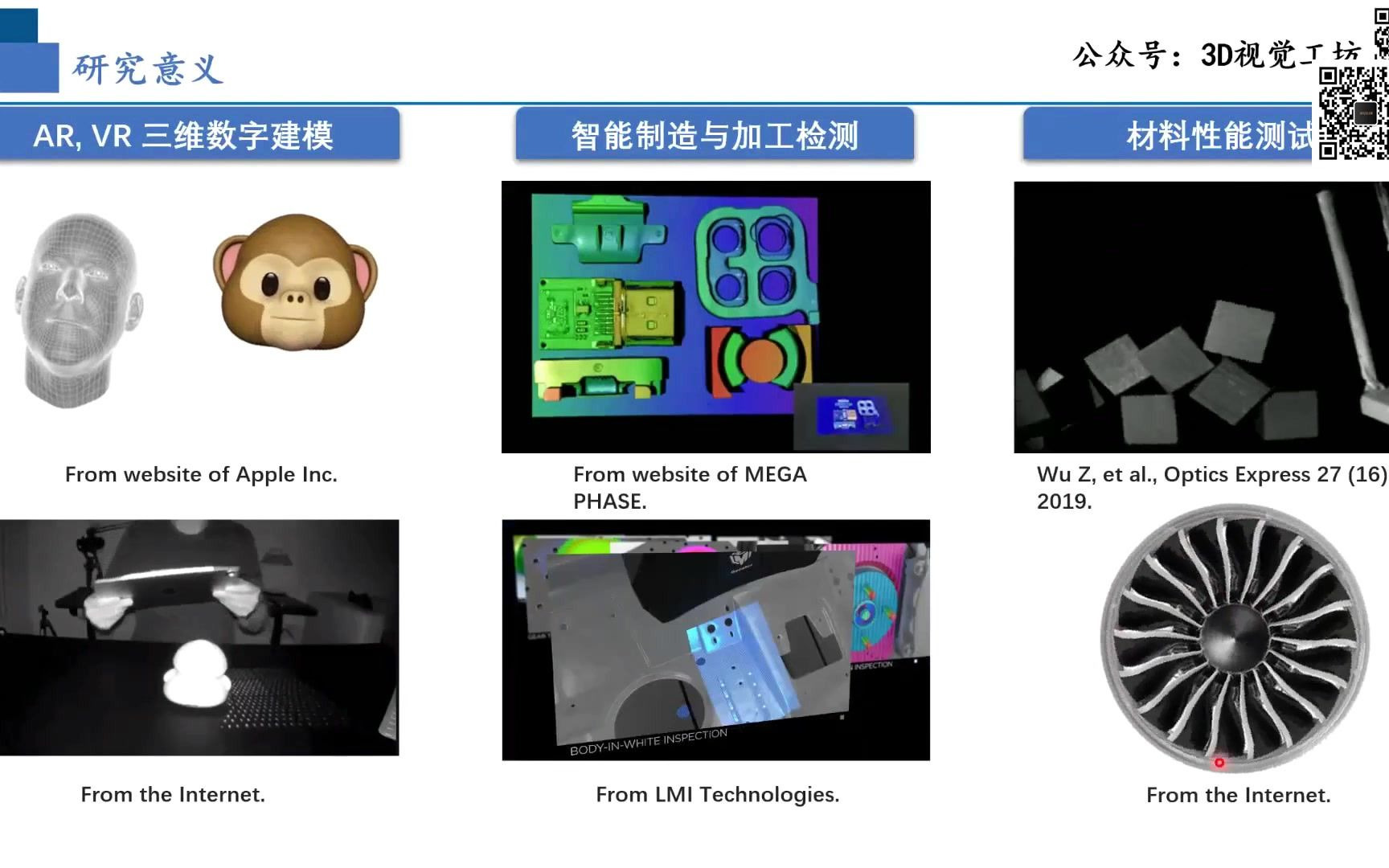
高速结构光三维面形测量方法
发布人
大纲: 1、研究意义; 2、高速成像技术; 3、高速投影技术; 4、高速三维测量案例; 5、总结。 主讲老师: 吴周杰,博士,目前为四川大学三维传感器与机器视觉实验室博士后,主要从事便携式三维测量和高速动态过程三维形貌及形变测量等方面的研究。
打开封面
下载高清视频
观看高清视频
视频下载器
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
从零搭建一套结构光3D重建系统 [理论+源码+实践]
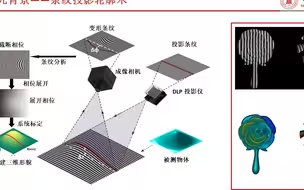
CVPR2021,结构光低计算成本准确恢复分段平面场景
精迅V1 | 科研级单目双目高精度3D结构光扫描仪
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
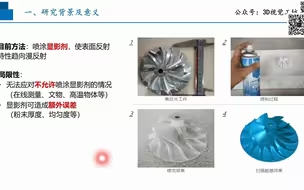
高反光表面三维视觉测量方法
格雷码辅助实现的三维面形测量:从静态到动态
[非完整版]基于结构光投影三维重建技术系列课程-绪论
3D线激光相机检测技术解析与应用分享
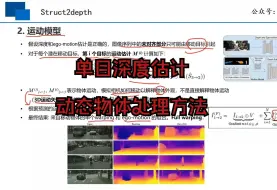
单目深度估|动态物体处理方法
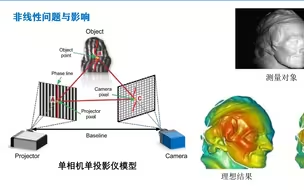
结构光的非线性问题与校正
光学3D测量技术原理及应用
大作业|激光-视觉-IMU-GPS融合SLAM算法
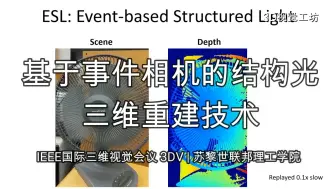
基于事件相机的三维结构光技术ESL,性能好于Realsense技术!
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
WACV2023:基于结构光的RGB事件相机(代码开源)
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
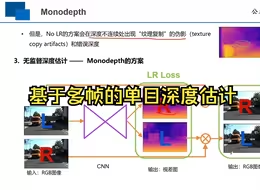
单目深度估计:基于多帧的方法
多视图几何方式的三维重建
自动驾驶中的视觉感知技术
Sicence子刊,复杂环境下卷积网络实现端到端高速自主飞行!
三维重建中的网格处理算法分享(公开课)
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
如何进行三维重建?从单帧深度估计到完整模型重建
三维点云系列视频——第一章绪论
相机标定的基本原理与经验分享
上海 AI Lab&同济大学!基于八叉树结构的3D高斯体渲染方法,实现一致的实时渲染性能
面向三维视觉的C++参考书籍
中国科大&HKUST 基于3D高斯和形成模式采样的文本到三维场景生成方法
Open3D-三维数据结构
自动驾驶实战课之多相机间的同步实战
3D重建革命!零预训练10倍 速度360°重建新方法 ZeroRF
如何高效学习单目深度估计?
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
ICRA2020,卡内基梅隆大学机器人研究所,基于三维子图显著性的水下环境主动SLAM探测应用
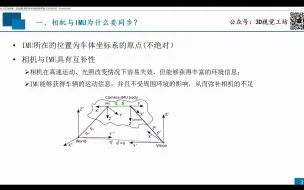
自动驾驶实战课之相机与IMU间的同步实战
3D测量软件简介系列-MeshRoom(开源)
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
单目深度估计绪论
单目深度估计|连续帧方法实战课