V
主页
Occupancy占用网络的多维应用探究
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
特斯拉自动驾驶FSD入华临近,深度梳理4家受益核心上市公司
Occupancy的工程细节
BEV与Occupancy网络的全景解析与实战
BEV与Occupancy入门参考资料必看
BEV&Occ提升颗粒度的方案
Open3D与点云处理简介(公开课)
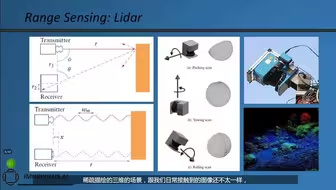
光学3D测量技术原理及应用
高速结构光三维面形测量方法
NVIDIA最新DiPIR:无缝地将3D物体插入任何自动驾驶和其它场景中!
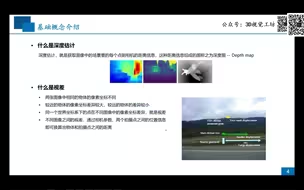
单目深度估计绪论
四元数基础
四旋翼无人机-PX4控制算法原理
Power:自动驾驶中鸟瞰视图下端到端实例预测
深度相机概述
相机标定的基本原理与经验分享
星越L智能辅助驾驶和拨杆变道操作演示
三维点云系列视频——第一章绪论
四旋翼无人机-PX4控制算法代码
当3DGS遇上可泛化物体位姿估计
英伟达-OmniDrive:基于稀疏查询的三维自驾VLM框架
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
单目深度估计|连续帧方法实战课
LVI-SAM代码实战与评估
国内首个面向具身智能方向的理论与实战系统课程
乐道L60的空间智舱,真比Y更香?
传感器与遥控器校准原理
0接管,小鹏5.3.0先锋版4晚高峰一镜到底
B站强推!自动驾驶中的多模态3D目标检测实战教程,计算机博士从零解读特征表示/对齐/融合,轻松搞定论文创新点(人工智能/深度学习/计算机视觉)
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
理想汽车周榜9月2周:年末冲刺开启,再谈理想智驾风波!
如何轻松拿捏LIO-SAM-数学基础篇
学习教程:点云匹配-正态分布变换NDT(Normal Distributions Transform)算法
发布会:AI时代智驾轿车极越07重磅发布 百度吉利联合打造 宁德时代电池装甲
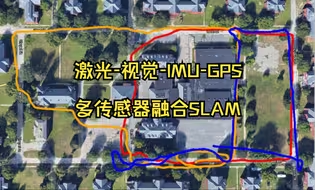
大作业|激光-视觉-IMU-GPS融合SLAM算法
PID控制器原理讲解
五分钟开发一款自己的点云处理软件(python)
LVI-SAM|视觉-惯性子系统(VIS)代码精读
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
涵公子驾道|极越07「ASD」城区智驾首试:一镜到底「还原真相」