V
主页
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
发布人
黄江勇 北京大学智能学院在读博士,北京通用人工智能研究院(BIGAI)通用视觉实验室实习研究员。研究方向为多模态学习,场景理解,具身智能。 直播大纲 1.研究背景与动机 2.具身通用智能体: LEO 3.三维指令微调数据集: LEO-align & LEO-instruct 4.实验结果与demo展示
打开封面
下载高清视频
观看高清视频
视频下载器
具身智能势不可挡GRUtopia首个城市级具身智能仿真平台“浦源·桃源”
国内首个面向具身智能方向的理论与实战系统课程
光学3D测量技术原理及应用
如何进行三维重建?从单帧深度估计到完整模型重建
CVPR'24 Symphonies:基于实例级建模的3D场景占用
讲座10 | 具身智能视角下的三维场景理解、生成与交互——北京通用人工智能研究院研究员贾宝雄
李飞飞创业三个月,狂揽10亿美金,硅谷吸金狂潮涌起
四旋翼模型与控制基础
PID控制器原理讲解
传感器与遥控器校准原理
Transcrib3D:基于大语言模型三维指称表达理解SOTA
深度相机概述
三维扫描仪技术概览+高亮透明户外扫描挑战
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
高反光表面三维视觉测量方法
五分钟开发一款自己的点云处理软件(python)
传统深度估计方法实战
单目深度估计|连续帧方法实战课
Linux驱动基础知识与SLAM关系
LVI-SAM代码实战与评估
BEV与Occupancy入门参考资料必看
ORB-SLAM3系列之特征匹配(三 MLPnP,词袋模型)
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
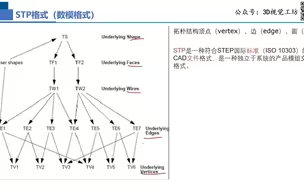
Open3D-三维数据结构
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
LVI-SAM|视觉-惯性子系统(VIS)代码精读
复合机器人+多模态大模型=人机协作具身智能体
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
Python之课前准备
格雷码辅助实现的三维面形测量:从静态到动态
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
Vision Language Action研究现状
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM