V
主页
量产经验分享:如何提升相机标定的精度?
发布人
相机标定在自动驾驶中具有重中之重的作用,那如何提升相机标定呢?今天和大家一起分享一下。 分享人:路飞,自动驾驶之心前沿技术研究团队成员,曾在头部自动驾驶公司工作多年,有多年的自动驾驶算法研发和项目交付经验。在IROS,ICRA,RA-L,SIGGRAPH,TVCG等机器人、计算机图形学领域发表多篇论文,在自动驾驶传感器标定、SLAM、模型优化方面有着丰富的研究和项目交付经验。 ————内容来自《面向工程和量产级的相机标定与实战教程(就业班)》:https://wrzpl.xetslk.com/s/3prL31
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定:从入门到实战【01概述】
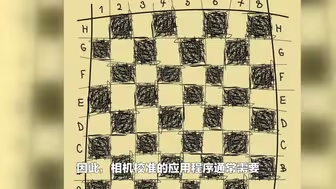
相机标定步骤和影响标定板精度的主要因素
为什么要进行相机标定?
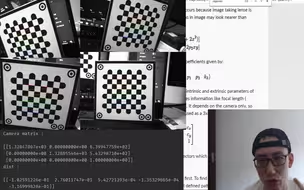
相机标定的基本原理与经验分享
相机标定:从入门到实战【05相机标定方法】
三维重建第七课:相机标定代码讲解
今天我们学习平移旋转标定
相机标定:从入门到实战【02相机基础知识】
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
相机标定:从入门到实战【03图像基础知识】
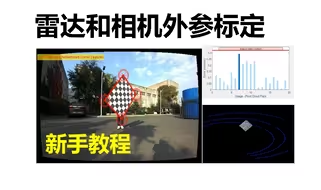
激光雷达和相机的标定
ICRA2023 | 激光雷达相机内外参联合标定方案!
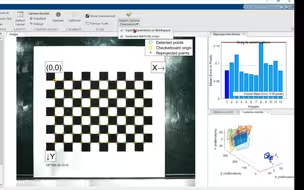
相机标定:从入门到实战【06MATLA相机标定工具】
OpenCV相机标定
相机标定的基本原理与经验分享
3.1 相机标定的基本概念
RTK定位为什么精度那么高?看完你全明白了,还有教程...
使用matlab和opencv进行相机标定
新一代结构光3D相机
搞懂了!原来激光雷达和相机的内外参是这样标定的
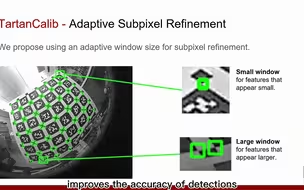
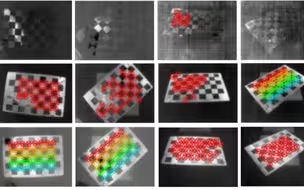
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
博士研究生 计算机视觉组会【1】 红外相机标定 深度学习 ||高效率本人汇报内容 与导师点评 直播录屏
手眼标定—原理与实战(上篇)
上下相机各自基准对位
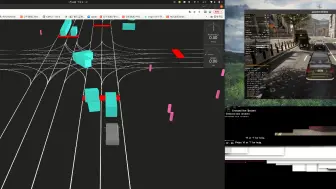
Carla二次开发
端到端的自动挖掘机!ExACT:首次用模仿学习构建端到端自动挖掘机系统
第26集 | 目标之间的距离计算
检测一切新模型!刷新记录!Grounding DINO 1.5:最强开集目标检测模型
详解自动驾驶多传感器标定,激光雷达标定,摄像头标定,毫米波雷达标定
吹爆!这绝对是河南理工最出名的机器视觉Halcon教程没有之一,手把手教你从软件安装到项目实战,快速入门巨简单,小白也能学得会!人工智能|深度学习|计算机视觉
绝对是2024年最好的【三维重建】教程!北邮教授鲁鹏15小时把计算机视觉3D三维重建讲的如此透彻!深入浅出SfM与SLAM核心算法/摄像机几何
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
CV小白必看!全网推荐的计算机视觉六大经典算法:图像处理、图像提取、目标检测、图像检索、图像分类、医疗影像等一次性学完!全程通俗易懂
英伟达最新!Cube-LLM:通过视觉语言模型,真正感知3D世界
CVPR 2024 | 相机标定算法再升级!基于圆锥曲线的无偏估计~失真也好用!