V
主页
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
发布人
视频出自国内首门多传感器标定教程,从0到1学会多传感器标定(20+种在线/离线实战方案),入门到进阶首选。自动驾驶传感器标定领域一线专家带队,参与多个量产项目,从理论到实战循序渐进。学习链接:https://wrzpl.xet.tech/s/dpYnP
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
量产经验分享:如何提升相机标定的精度?
从0到1!彻底搞懂BEVFormer算法原理
搞懂了!原来激光雷达和相机的内外参是这样标定的
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
高精地图制作关键技术及领域主流方案分享-part1
大火的BEVFusion算法详解
特斯拉的4D自动标注详解!为什么无标注数据work?
史上最全!一次性梳理自动驾驶鲁棒性研究
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
BEVPool是什么?实际工程应用中如何加速!!!深度解析
多传感器融合!BEV感知融合算法介绍
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
自动驾驶中的多传感器融合状态估计如何建模?
自动驾驶如何学好C++?
最新!DiscoNet:稀疏遮挡Lidar点云下的鲁棒3D感知方法!
NeRF如何监督Occupancy Networks?
ICRA2023 | 激光雷达相机内外参联合标定方案!
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
自动驾驶面试一百问!秋招社招全搞定
激光雷达3D目标检测算法有哪些?怎么分类的?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
讲明白了!端到端算法评估指标详解
UZH最新博士论文!事件摄像机的数据驱动方法
特斯拉的World Model是什么?怎么做端到端训练?
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
自动驾驶多传感器数据融合(4):多目标跟踪算法
从零开始Mamba之路 | 如何从线性RNN的角度推导Mamba?
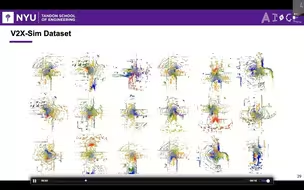
Nuscenes、KITTI等多个BEV开源数据集介绍!
多模态3D检测相关2D和3D感知基础知识
数据为王!自动驾驶开源数据体系现状与未来
专注于学习PnC的端到端方法详解
面向下一代自动驾驶:全栈里程碑综述汇总
世界模型!特斯拉CVPR2023 Workshop!
多传感器标定的工具箱有哪些?
自动驾驶汽车是如何在高精地图中建立精确位置的?