V
主页
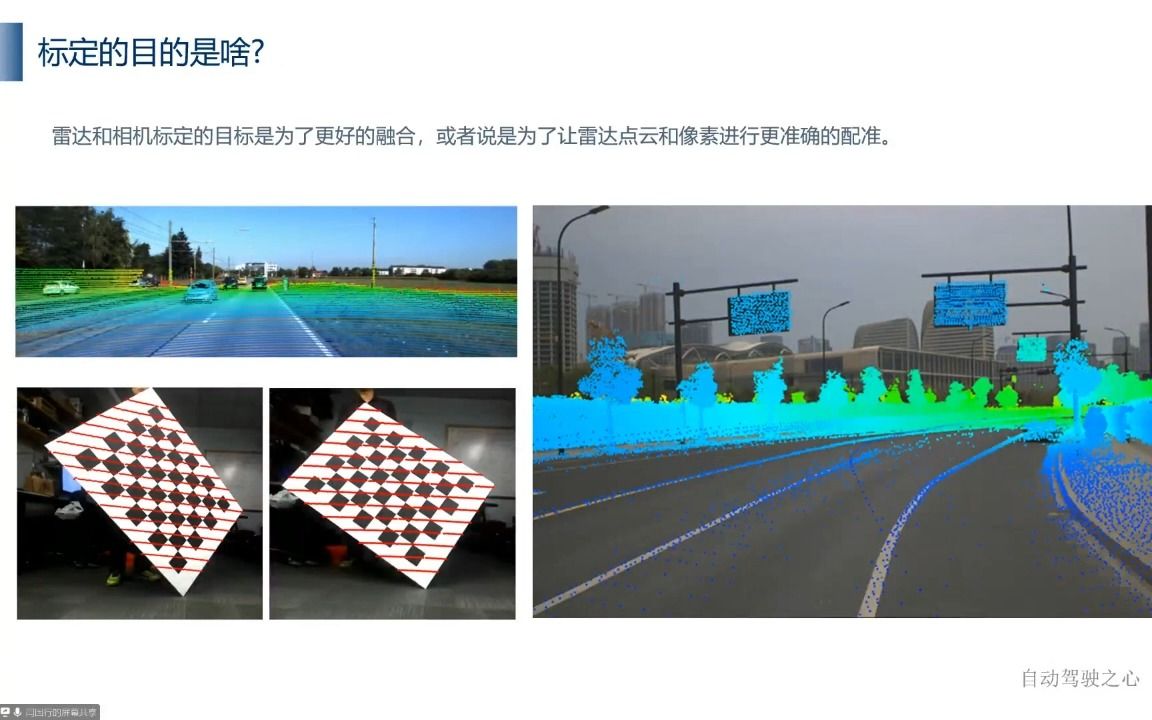
ICRA2023 | 激光雷达相机内外参联合标定方案!
发布人
公众号【自动驾驶之心】后台回复 “联合标定” 获取视频课件!
打开封面
下载高清视频
观看高清视频
视频下载器
搞懂了!原来激光雷达和相机的内外参是这样标定的
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
从0到1!彻底搞懂BEVFormer算法原理
激光雷达3D目标检测算法有哪些?怎么分类的?
毫米波雷达视觉算法CRAFT,这次彻底理解了!
讲明白了!端到端算法评估指标详解
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
Nerf+SLAM会擦出什么样的火花?
LIO-SAM:一种紧耦合激光雷达-惯性里程计
量产经验分享:如何提升相机标定的精度?
ICCV 2023 | SparseFusion:基于稀疏表征融合的多模态3D新方案!
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
最新!CoRL 2022 |Waymo分享自动驾驶行为 模型方案
使用YOLOv4完成激光雷达点云下的3D目标检测!
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
实战超详细!Radar、Lidar和前置Camera的标定
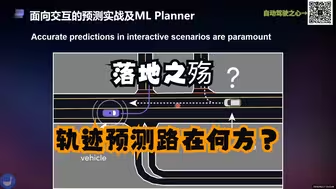
落地之殇 | 联合预测是端到端正确的道路么?
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
毫米波雷达量产实战!Radar是如何获取点云的?
Tesla惊艳的防碰撞机制是如何实现的?TESLA Occupancy Networks:Don’t Crash, EVER!!
高精地图制作关键技术及领域主流方案分享-part1
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
机载激光雷达赛项
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
校招和社招转行人必看!2023年如何入局自动驾驶?
BFS是个啥?为什么规划控制需要它?
CNN&Transformer如何高效部署?大牛带你彻底搞懂!
ITSC2023 | LimSim:长期可交互多场景交通仿真器
All in 算法并不是最佳职业发展道路?软件基础架构也是必须了解的!