V
主页
空间机器人技术-建模与控制基础:3.旋转矩阵(坐标转换矩阵)
发布人
这是面向大三学生的入门课程,视频作为课堂教学的补充。目前仅录制了固定基座机械臂的运动学部分。水平有限,请多指教~ 视频内容:旋转矩阵的基本定义。旋转矩阵是从静态的视角描述姿态的方法,给出最全面的信息。
打开封面
下载高清视频
观看高清视频
视频下载器
空间机器人技术-建模与控制基础:2.刚体的位置和姿态
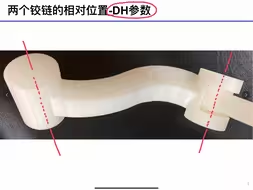
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
空间机器人技术-建模与控制基础:5.旋转矩阵的作用-坐标转换
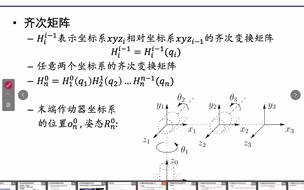
空间机器人技术-建模与控制基础:9.齐次矩阵
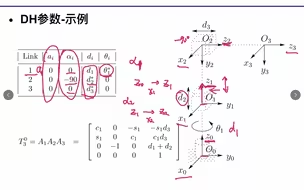
空间机器人技术-建模与控制基础:13.DH参数举例
空间机器人技术-建模与控制基础:4.旋转矩阵的性质
补充2.3_空间机器人技术-动力学与控制-DH坐标系与DH参数
空间机器人技术-建模与控制基础:22.末端力与关节力之间的关系
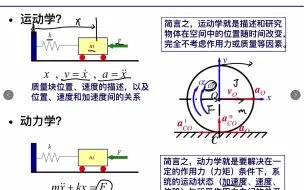
空间机器人技术-建模与控制基础:10.运动学简介
空间机器人技术-建模与控制基础:17.线速度和角速度
补充5.1-空间机器人技术-动力学与控制-动力学方程推导中的求和符号
空间机器人技术-建模与控制基础:15.URDF文件
空间机器人技术-建模与控制基础:11.最少坐标系的选取原则
补充5.2-空间机器人技术-动力学与控制-转动惯量
空间机器人技术-建模与控制基础:21.速度级逆运动学
空间机器人技术-建模与控制基础:1.概述
补充2.2_空间机器人技术-动力学与控制-DH参数的物理意义
补充2.4_空间机器人技术-动力学与控制—角速度1
空间机器人技术-建模与控制基础:16.速度级运动学的基本内容
补充2.1_空间机器人技术-动力学与控制-旋转矩阵-相似变换
补充1.2_矢量运算(空间机器人技术-动力学与控制-补充材料)
补充2.4_空间机器人技术-动力学与控制—角速度3
补充1.1_矢量概念(空间机器人技术-动力学与控制-补充材料)
补充2.4_空间机器人技术-动力学与控制—角速度2
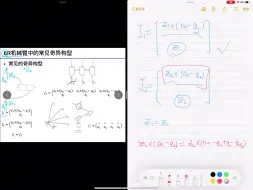
补充2.5-空间机器人技术-动力学与控制-机械臂中常见的奇异构型
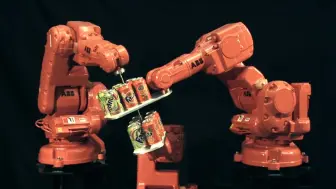
补充视频:ABB 机械臂高级运动控制
补充视频:阻抗控制-人形机器人
补充4.1-轨迹规划——国际空间站加拿大II臂运动视频
补充视频:ABB Yumi技术细节
补充视频:人机协作机器人ABB yumi—1
业界巨大突破:尸体机器人 | 尸体也能制成机器人 | 最强战场兵器!
七分钟学会你想要的暗配技术。培训学校机构开锁公司。学配汽车钥匙
[开源了]全球最小的桌面级双轮足机器人(开源地址在视频简介)
国产机械蜗牛,能组合变身成多种形状
未来已来 机器人触觉新突破
欢迎来到赛博机甲世界,AI视频让人物活过来了,吼吼
【免费QQ机器人】刷qq空间说说点赞和说说浏览量
发明咬人玩具的人真是个天才,它是如何做到纯机械随机触发的
【机械学习】B站的这几位博主不是在教机械,而是在做慈善啊!
MIT新型机械腿:意念驱动、还带空间感,让截肢者重获新生