V
主页
补充2.2_空间机器人技术-动力学与控制-DH参数的物理意义
发布人
解释DH参数的作用。
打开封面
下载高清视频
观看高清视频
视频下载器
补充2.3_空间机器人技术-动力学与控制-DH坐标系与DH参数
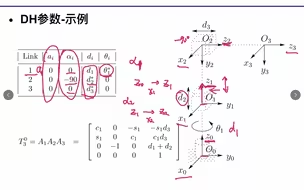
空间机器人技术-建模与控制基础:13.DH参数举例
空间机器人技术-建模与控制基础:12.DH坐标系与DH参数
空间机器人技术-建模与控制基础:3.旋转矩阵(坐标转换矩阵)
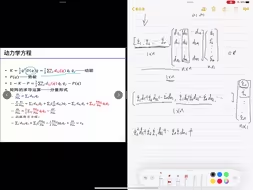
补充5.1-空间机器人技术-动力学与控制-动力学方程推导中的求和符号
补充1.2_矢量运算(空间机器人技术-动力学与控制-补充材料)
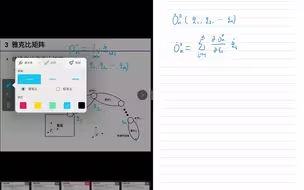
空间机器人技术-建模与控制基础:19.线速度的雅克比矩阵
空间机器人技术-建模与控制基础:22.末端力与关节力之间的关系
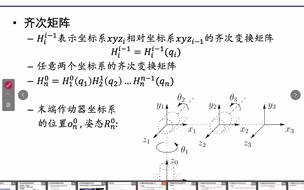
空间机器人技术-建模与控制基础:9.齐次矩阵
补充5.2-空间机器人技术-动力学与控制-转动惯量
空间机器人技术-建模与控制基础:5.旋转矩阵的作用-坐标转换
补充视频:新松机器人-高级运动控制
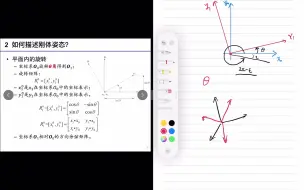
空间机器人技术-建模与控制基础:2.刚体的位置和姿态
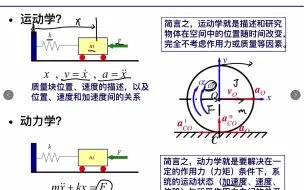
空间机器人技术-建模与控制基础:10.运动学简介
空间机器人技术-建模与控制基础:18.角速度的雅克比矩阵
补充2.1_空间机器人技术-动力学与控制-旋转矩阵-相似变换
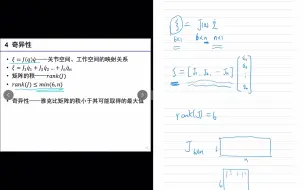
空间机器人技术-建模与控制基础:20.奇异性
空间机器人技术-建模与控制基础:6.旋转矩阵的作用-矢量的旋转
空间机器人技术-建模与控制基础:1.概述
补充2.4_空间机器人技术-动力学与控制—角速度2
空间机器人技术-建模与控制基础:4.旋转矩阵的性质
空间机器人技术-建模与控制基础:8.姿态参数
空间机器人技术-建模与控制基础:16.速度级运动学的基本内容
空间机器人技术-建模与控制基础:7.旋转的复合
补充1.1_矢量概念(空间机器人技术-动力学与控制-补充材料)
空间机器人技术-建模与控制基础:15.URDF文件
补充2.4_空间机器人技术-动力学与控制—角速度1
空间机器人技术-建模与控制基础:11.最少坐标系的选取原则
补充2.4_空间机器人技术-动力学与控制—角速度3
补充视频:阻抗控制-人形机器人
[开源了]全球最小的桌面级双轮足机器人(开源地址在视频简介)
补充视频:ABB 机械臂高级运动控制
空间机器人技术-建模与控制基础:14.位置级逆运动学
空间机器人技术-建模与控制基础:17.线速度和角速度
补充视频:人机协作机器人ABB yumi—1
补充2.5-空间机器人技术-动力学与控制-机械臂中常见的奇异构型
空间机器人技术-建模与控制基础:21.速度级逆运动学
补充视频:ABB Yumi技术细节
航天器姿态动力学与控制-Rotational Inertia and Tumbling
补充视频:机器人控制-深度强化学习