V
主页
【调试寄录】五天速通轮腿平衡步兵
发布人
视频中的调试流程有误!!!应该先对轮毂电机进行调试再到关节电机!!! 前面一直是传统的LQR+PID控制,没有把腿部与轮毂联系在一起,后续发现这样子的VMC算法不可行,耦合性虽然低但是控制起来的稳定性较差,然后开始搭建嵌入式以及MATLAB框架,花费2个月左右重写了VMC,考完试之后马上把代码一次次烧进实机,测试五天,达到视频效果。 灵感来源@热心市民ZJH
打开封面
下载高清视频
观看高清视频
视频下载器
调试第五天 感觉哪里都怪怪的
“自动驾驶,请勿加塞!”|华南农业大学哨兵机器人
【平衡实况寄录】新的平衡已经出现,怎么能够停滞不前~
上交平衡步兵模型。理论,仿真,源码详细讲解。助您快速上手。(一)
【开源啦!】无刷轮腿平衡机器人
并联轮腿式移动机器人——平衡步兵
[幼年轮腿]重心自适应
轮腿机器人-初步效果展示
轮腿:你这还是人?
【Venus进度记录】四连杆轮腿机器人腿部运动仿真及实物测试
还未孵化出生的轮腿调试寄录
平衡步兵立定跳远,把轮子跳没了
轮腿平衡演示
四川大学rm,双枪管全向轮步兵训练
五天速通平衡步兵
轮腿机器人但是毕业设计
平衡步兵(无头版)
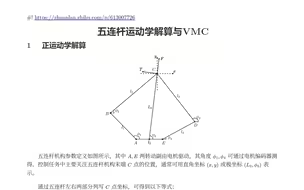
五连杆运动学解算与VMC
【已开源】轮腿机器人力控Webots仿真(牛顿欧拉法+LQR+VMC)
终于进国赛了,终于可以发了
轮腿平衡机器人的调试
西安“二人转”?|西安交通大学&西北工业大学平衡步兵机器人
你还记得拉格朗日方程吗?|南京航空航天大学轮腿平衡机器人研发揭秘
跳,都可以跳|平衡步兵综合运动展示
【调试寄录】能用就行
深度强化学习训练平衡步兵机器人开源
跳出课本看LQR控制,从公式到代码!
《麦轮平衡, 对手难绷》新版同轴麦轮综合功能演示【RM】
【平衡步兵寄录】击 你 胎 没
【RoboMaster2022-战队寄录】舵轮底盘,纵享丝滑
轮腿平衡车(无头版)
【RoboMaster】重力补偿而已,没什么大不了的
[平衡步兵寄录] LQR自适应重心
【调试寄录】浅尝一下动态预测击打能量机关
记一次打符
机魂不悦.jpg
步兵:雷达导航为什么总是不准
中心供弹 和 自适应悬挂
进国赛了,可以发了
平衡步兵机器人Ghost实验测试记录