V
主页
CMU 最优控制 2024 第 18 讲 随机最优控制和 LQG
发布人
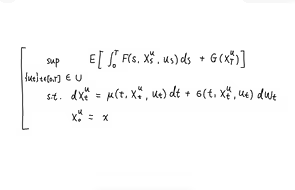
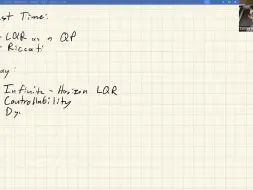
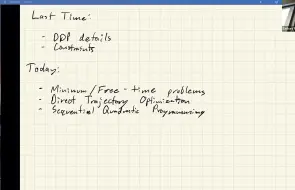
Lecture 18 for Optimal Control and Reinforcement Learning 2024 by Prof. Zac Manchester. Topics: - Stochastic Optimal Control Intro - The LQG Problem - The Separation Principle and Certainty Equivalence
打开封面
下载高清视频
观看高清视频
视频下载器
2024世界机器人大会现场,开上“高达”了~
CMU 最优控制 2024 第 9 讲 凸 MPC
CMU 最优控制 2024 第 1 讲
1X 机器人采访 by S3|2024.9.1
CMU 最优控制 2024 第一讲
金融工程(39)随机最优控制问题
CMU 机器人讲座 —— 构建适应性强的通用机器人
CMU 最优控制 2024 第 8 讲 可控性和动态规划
MIT 欠驱动机器人学 2024 第 6 讲 动态规划 III
MIT 欠驱动机器人学 2024 第 10 讲 Trajectory Optimization I
CMU 最优控制 2024 第 7 讲 线性二次调节器的三种方法
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
CMU 最优控制 2024 第 5 讲 Optimization Pt. 3
2024世界机器人大会闲逛(基本信息请看简介)
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
CoRL —— 开幕词
机器人逆运动学示例
CMU 最优控制 2024 助教补充 第 1 讲 ODE 与线性化
MATLAB - Robust Control(鲁棒控制) 官方出品
人形机器人控制及仿真
CMU 最优控制 2024 第 12 讲 直接轨迹优化
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
2024 斯坦福 凸优化教程 Stephen Boyd 第三讲
这逼真程度?!差点把机器人当成我同事给牵走 | 暴走两万步挤进2024世界机器人大会上人最多的五个展厅
MATLAB - Learning-Based Control(基于学习的控制) 官方出品
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
RobotSketch: 腿式机器人超快速设计的交互式展示|SIGGRAPH 2024【韩国科学技术院】
CMU 最优控制 2024 助教补充 第6讲 轨迹优化
斯坦福大学 Khatib 讲座 —— 深海机器人探索
波士顿动力创始人 Marc Raibert 关于机器人未来的采访
终于玩上了!使用Isaac实现unitree H1的运动仿真
CMU 最优控制 2024 助教补充 第 8 讲
实时最优控制讲座 —— 从航空航天的角度
CoRL 讲座 Scott Kuindersma - 基于模型的控制有助于学习
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
北京2024世界机器人大会 美女机器人
宾大 GRASP 讲座 —— 机器人中的具身人工智能
CoRL 讲座 —— 可泛化几何机器人学习