V
主页
CMU 最优控制 2024 助教补充 第 1 讲 ODE 与线性化
发布人
00:00 - Intro 02:30 - Dynamic systems 09:20 - Converting to 1st order 13:45 - Is it linear? 19:35 - ODE as a vector field 23:00 - Solving linear ODE's 36:18 - Stability 42:00 - Discretizing forced ODE's 50:40 - 1st order Taylor Series
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 最优控制 2024 助教补充 第 7 讲
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
教程:使用 CVXPY 进行凸优化 - SciPy 2022
CMU 最优控制 2024 第 9 讲 凸 MPC
CMU 最优控制 2024 第 1 讲
MIT 欠驱动机器人学 2024 第 6 讲 动态规划 III
CMU 最优控制 2024 第 19 讲 卡尔曼滤波器和二重性
实时最优控制讲座 —— Crocoddyl 教程
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
实时最优控制讲座 —— 最优控制机器人软件
CMU 最优控制 2024 第 10 讲 非线性轨迹优化
实时最优控制讲座 —— 从航空航天的角度
MIT 欠驱动机器人学 2024 第 10 讲 Trajectory Optimization I
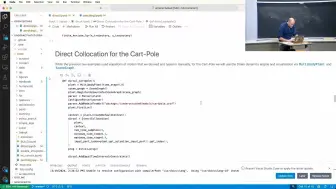
CMU 最优控制 2024 第 12 讲 直接轨迹优化
CoRL 讲座 Russ Tedrake - 从鲁棒控制到基础模型,对鲁棒性的看法多种多样
CoRL 讲座 Scott Kuindersma - 基于模型的控制有助于学习
CMU 最优控制 2024 助教补充 第 2 讲 牛顿法和受约束优化
Optimal Control CMU 2024 Lecture 2 动力学离散化与稳定性
CMU 最优控制 2024 助教补充 第 9 讲 稀疏轨迹优化
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
MIT 欠驱动机器人学 2024 第 5 讲 Acrobots, Cart-poles, and Quadrotors I
MATLAB - Learning-Based Control(基于学习的控制) 官方出品
Autonomy Talks - 网络物理移动实验室中的多代理决策制定
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
IROS 2023 讲座 —— 从基于模型的全身控制到利用 ML 进行足式人形机器人操作
CMU 最优控制 2024 第 5 讲 Optimization Pt. 3
CoRL 讲座 —— 可泛化几何机器人学习
MIT 欠驱动机器人学 2024 第 8 讲 Computing Lyapunov Functions I
CMU 最优控制 2024 第 14 讲 Optimizing Rotations
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
多伦多大学 —— 四旋翼动力学与控制
用于控制、推理和学习的随机扩散
MIT 欠驱动机器人学 2024 第 7 讲 Lyapunov Analysis I
MATLAB - 使用 RRT 算法路径规划(官方出品)
MATLAB - State-Space(状态空间) 官方出品
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
MATLAB - Understanding Kalman Filters 官方出品
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
CoRL 讲座 —— 利用 MuJoCo 物理模型进行基于模型的优化