V
主页
CMU 最优控制 2024 第 8 讲 可控性和动态规划
发布人
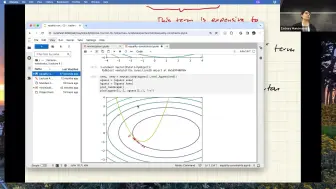
Lecture 8 for Optimal Control and Reinforcement Learning (CMU 16-745) 2024 by Prof. Zac Manchester. Topics: - Infinite-Horizon LQR - Controllability - Dynamic Programming - What are the Lagrange multipliers / co-states?
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 最优控制 2024 第 9 讲 凸 MPC
CMU 最优控制 2024 第 18 讲 随机最优控制和 LQG
2024世界机器人大会现场,开上“高达”了~
用 ROS 2 在 Isaac Sim 中驾驶自主移动机器人
世界最强AI驱动机器人 Figure 02 发布🤖
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
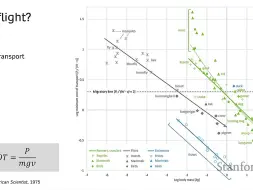
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
CMU 最优控制 2024 第 7 讲 线性二次调节器的三种方法
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
CMU 最优控制 2024 第 13 讲 Dealing with 3D Rotations
CMU 最优控制 2024 第 6 讲 确定性最优控制入门
CMU 最优控制 2024 助教补充 第 1 讲 ODE 与线性化
B站首推!不愧是李宏毅老师讲的【强化学习】简直太详细!!!2024公认最通俗易懂的【强化学习教程】小白也能信手拈来(人工智能|机器学习|深度学习|强化学习)
MATLAB - Robust Control(鲁棒控制) 官方出品
MIT 欠驱动机器人学 2024 第 9 讲 Computing Lyapunov Functions II
我在B站上大学系列!北大王树森精讲7小时搞懂深度强化学习!建议收藏!
CMU 最优控制 2024 第 4 讲 Optimization Pt 2
CMU 最优控制 2024 助教补充 第 2 讲 牛顿法和受约束优化
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
【强化学习玩游戏】强化学习轮足机器人控制器,PPO算法原理+公式推导,月球登陆器训练+超级马里奥简单易懂的项目实战!
CMU 机器人讲座 —— 构建适应性强的通用机器人
CMU 最优控制 2024 第 5 讲 Optimization Pt. 3
CoRL 讲座 —— 利用 MuJoCo 物理模型进行基于模型的优化
IROS 2023 基于模型的多接触操作
CoRL —— 开幕词
Isaac ROS Office Hours
CMU 最优控制 2024 助教补充 第 2讲 KKT 条件和增量拉格朗日
斯坦福机器人讲座 —— 推动机器人技术在现实世界中的应用
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
OpenAI投资的1X机器人NEO动作丝滑到让人分不出
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
Autonomy Talks - 网络物理移动实验室中的多代理决策制定
CoRL 辩论 —— 扩大规模是否足以部署通用机器人?
CMU 最优控制 2024 第 3 讲 Optimization Pt 1
【S3】中文字幕|They Built This Robot For Your Home | 1X Technologies
CMU 最优控制 2024 助教补充 第6讲 轨迹优化
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍
MATLAB - 使用 RRT 算法路径规划(官方出品)
CoRL 讲座 Scott Kuindersma - 基于模型的控制有助于学习