V
主页
京东 11.11 红包
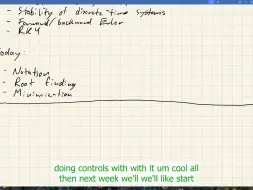
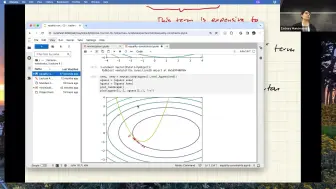
CMU 最优控制 2024 第 9 讲 凸 MPC
发布人
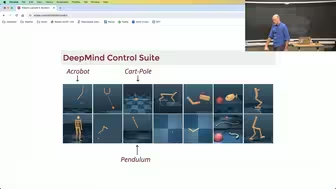
Lecture 9 for Optimal Control and Reinforcement Learning (CMU 16-745) 2024 by Prof. Zac Manchester. Topics: - Convexity Background - Convex Model-Predictive Control
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 最优控制 2024 第 19 讲 卡尔曼滤波器和二重性
CMU 最优控制 2024 助教补充 第 7 讲
CMU 最优控制 2024 第 17 讲 迭代学习控制(Iterative Learning Control)
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
CMU 最优控制 2024 第 13 讲 Dealing with 3D Rotations
MIT 欠驱动机器人学 2024 第 10 讲 Trajectory Optimization I
CMU 最优控制 2024 助教补充 第 1 讲 ODE 与线性化
CMU 最优控制 2024 第 8 讲 可控性和动态规划
MIT 欠驱动机器人学 2024 第 9 讲 Computing Lyapunov Functions II
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
CMU 最优控制 2024 第 10 讲 非线性轨迹优化
ETHZ ROS 教程 第 1 讲 ROS 简介
CMU 最优控制 2024 第 3 讲 Optimization Pt 1
教程:使用 CVXPY 进行凸优化 - SciPy 2022
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
CMU 最优控制 2024 助教补充 第 8 讲
MATLAB - Learning-Based Control(基于学习的控制) 官方出品
实时最优控制讲座 —— 从航空航天的角度
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
CMU 机器人讲座 —— 构建适应性强的通用机器人
CMU 最优控制 2024 第 4 讲 Optimization Pt 2
USC 2024 机器人基础 第 19 讲 马尔科夫决策过程
Isaac ROS Office Hours
Optimal Control CMU 2024 Lecture 2 动力学离散化与稳定性
MIT 欠驱动机器人学 2024 第 8 讲 Computing Lyapunov Functions I
2024 斯坦福 凸优化教程 Stephen Boyd 第 6 讲
MIT 欠驱动机器人学 2024 第 5 讲 Acrobots, Cart-poles, and Quadrotors I
CoRL 讲座 —— 用于机器人的预训练模型
CoRL 讲座 Scott Kuindersma - 基于模型的控制有助于学习
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
宾大 GRASP 讲座 —— 磁性手术机器人: 深入人体的 "奇幻之旅
2024 斯坦福 凸优化教程 Stephen Boyd 第三讲
2024 斯坦福 凸优化教程 Stephen Boyd 第 18 讲
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
2024 斯坦福 凸优化教程 Stephen Boyd 第 8 讲
CMU 机器人讲座 —— 机器人系统的鲁棒和松弛时态逻辑规划
CoRL 讲座 —— 可泛化几何机器人学习
西北大学机器人讲座 —— 机器人学习的控制原理
CMU 最优控制 2024 助教补充 第 5 讲 动态规划与 MPC
密西根大学机器人讲座 —— 多接触碰撞中的平稳性