V
主页
机器人逆运动学示例
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
USC 四足机器人研究 —— 通过 RL 增强 MPC 学习敏捷运动和敏捷行为
Isaaclab-Gazebo仿真
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
实时最优控制讲座 —— 最优控制机器人软件
ICRA 2024 全部论文及下载方式
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
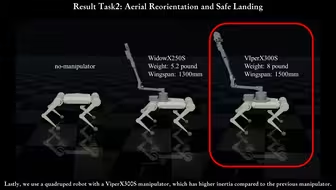
机械臂代替尾巴增强机器人的稳定性 四足机器人
斯坦福大学研究 - 用于机械手设计的动力学扩散模型
SkiROS2 - 基于技能操作的 ROS 机器人控制平台
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
强化学习示例 —— Anymal C
ETHZ 四足机器人研究 —— 利用 3D 表征 学习在狭窄空间行走
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
MuJoCo 人形机器人&四足机器人仿真一览
论文速递 VMP:多功能运动先验用于鲁棒追踪物理角色上的运动
CMU 机器人讲座 —— 面向大规模多智能体的智能规划(移动机器人,无人机)
开源机器人灵巧手(Jetson Nano)教程
德国宇航中心(DLR)人形机器人 neoDavid
人形机器人远程视觉操纵 论文和代码在简介
CoRL —— 开幕词
迪士尼机器人技术展示 —— Duke
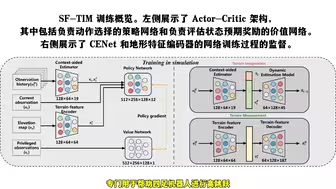
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
国产顶尖AI机器人再进化!烘焙弹琴泡茶打咏春...家务、才艺全精通!!
CMU 机器人讲座 —— 构建适应性强的通用机器人
NVIDIA 软硬件开发的人形机器人(From AVs to Humanoids)
实时最优控制讲座 —— OCS2 教程
西北大学机器人讲座 —— 机器人学习的控制原理
普林斯顿 IRoM 机器人研究 —— 自信感知: 基于学习的感知为导航提供安全保证(2024 开源)
密歇根大学机器人讲座 —— 机器人学中的高效通用算法
[新手可入门]基于pybullet强化学习机械臂抓取仿真
人形双足模仿学习强化学习AMP ASE Exbody求助
顶尖院校联合开源 - 机器人操作数据集 —— DROID: 大规模机器人操作数据集
USC 机器人讲座 —— 复杂地形上的机器人运动与感知
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)