V
主页
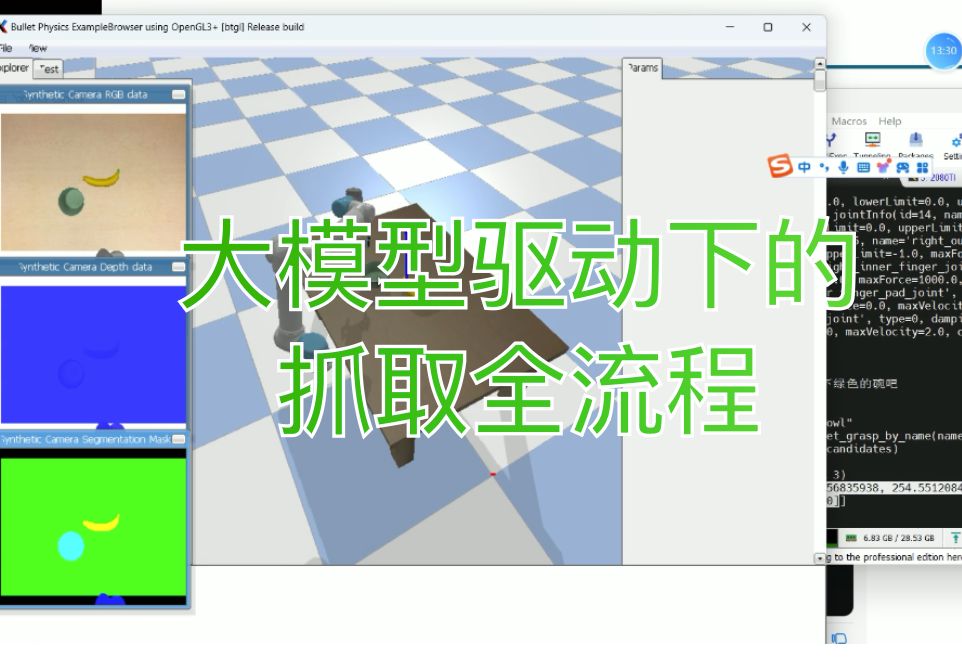
【具身抓取课程-0】大模型驱动下的具身抓取
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
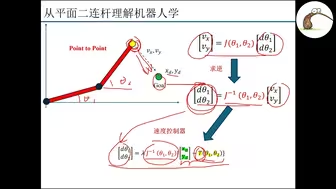
【具身抓取课程-1】机器人基础
使用Isaac Sim和ROS2实现大田农业机器人
你的具身智能第一课--基础技术路线
详解TensorRT的C++/Python高性能部署,实战应用到项目
Isaac Lab中文版文档正式上线!
用Isaac Lab和OpenUSD加速机器人学习
狗王争霸挑战赛,2周快速入门强化学习与locomotion
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan
2025顶会热点!三小时带你吃透【具身智能】 ,第二讲——LLMS for robotics
具身智能多模态基础:0. 视觉大模型开篇
多模态模拟面试与复盘第一阶段
手写NLP 长期 48_transformer逐行复现
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
Bert源码复现!逐行手写代码!看完即看懂!
14-1 从零手写模型量化框架 量化卷积原理
1.1模型量化概念及意义
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
MoveIt与Isaac Sim结合使用
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
当Diffusion进入现实:生成式3d模型理论与实践
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
isaac sim具身智能仿真系列:【2】快速了解一下perceptor和manipulator(佛系胡乱更新中)
6_CUDA流和并发
14-5 从零手写模型量化框架(公开部分) 实现Histogram统计activation
英伟达新利器fVDB:开启生成式物理智能 AI 的新时代
isaac sim具身智能仿真系列:【9】如何跟USD打交道,保存、加载和管理树状结构(佛系胡乱更新中)
AI新作|英伟达:人形机器人!全身控制模式无缝转换
手写AI_NLP系列课程之_文本分类
从零学习AI算法-5-python函数定义与使用
手写扩散模型-课程介绍
从零学习AI算法-3-数据与标签按行读取
秋招必备,自制大模型推理框架,征服面试官,cuda写sgemv算子
1.2 3D重建方法
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
【研三】自研多模态大模型架构——长时程、高鲁棒
工业界行为识别:摔倒识别数据集收集技巧
isaac sim具身仿真:【11】开始解析代码!用CoreAPI创造你的hello world(佛系胡乱更新中)
英伟达GPU高阶教程-cuda核函数编译与启动流程分析(2)
第二十节1:正式进入人工智能,复习sqrt函数