V
主页
CVPR2022 并非所有点都相等:学习3D激光雷达点云的高效点基探测器
发布人
Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds 并非所有点都相等:学习3D激光雷达点云的高效点基探测器 CVPR 2022
打开封面
下载高清视频
观看高清视频
视频下载器
Open3D与点云处理简介(公开课)
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
NASA JPL团队CoSTAR一大力作:直接激光雷达里程计利用密集点云快速定位
五分钟开发一款自己的点云处理软件(python)
点云3D深度学习模型与实践
CVPR2022 基于深度学习的人体前景目标检测
香港大学工作!CVPR2022:事件相机的自动对焦
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
CVPR2024开源NetTrack:跟踪高动态物体!
[CVPR2021] MonoRec:无需激光雷达,单相机实现三维场景的稠密重建,去除运动伪影,泛化性能好!代码开源!
[CVPR2022] 阿里巴巴: 用于单目深度估计的神经窗口全连接CRF
CVPR2022 深度方向感知功能图
CVPR2022:GAN监督的密集视觉配准用于多种AR应用
CVPR2022 基于神经网络的3D重建
TRO 2023 适用于高分辨率雷达的非光线投射占用栅格建图
ETH开源数据集SHIFT:一个用于连续多任务域自适应的合成驱动数据集 @3D视觉工坊 #CVPR2022
CVPR2022 3维通用Corruptions和数据增强
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
CVPR2022 端到端的半监督视频动作检测方法
大森林-所有指标全面领先!图像-点云配准最新SOTA!CoFiI2P详细介绍!
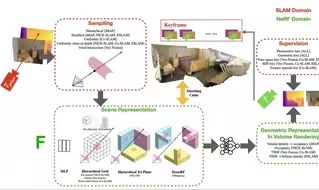
CVPR2024开源NeRF-SLAM新SOTA:请任意选择你的高效神经表征和渲染方程?
RA-L 2020:无需专门标定板或视图对齐的相机-激光雷达的校准方法
CVPR2022 BEVFormer:通过时空Transformer从多相机图像中学习鸟瞰视角表示
香港城市大学与微软联合工作!AI还原老电影 [CVPR2022]
[CVPR2022] 能换全身发型、服装的Gan网络(代码开源)
[CVPR2022] StyleMesh:室内 3D 场景重建的风格转移
CVPR2022 BACON: 具有分析傅里叶频谱和带限输出的新网络架构
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
CVPR 2021,点云配准工作!循环多视图对齐网络的无监督表面点云配准!
ECCV2022 SQN:大规模3D点云的弱监督语义分割
世界上第一个专为无人机集群设计的激光雷达惯性里程计框架
激光里程计精讲(上)
专为机器人优化而生的固态激光雷达Velarray M1600
CVPR2020:级联细化网络用于点云补全(代码开源)
K-Lane 大规模激光雷达车道检测数据集和基准
IROS2020,基于航空影像的自动驾驶汽车激光雷达定位
三维点云系列视频——第一章绪论
室内动态变化场景中的相机重定位(CVPR2021)
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
CVPR2021,结构光低计算成本准确恢复分段平面场景