V
主页
[CVPR2021] MonoRec:无需激光雷达,单相机实现三维场景的稠密重建,去除运动伪影,泛化性能好!代码开源!
发布人
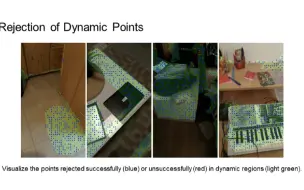
https://www.youtube.com/watch?v=XimdlXUamo0&t=12s 我们提出了一种半监督的单目稠密重建架构MonoRec,该方案可在动态环境中根据单个移动相机预测深度图,提出了一种新型的多阶段训练方案,该方案可以不需要LiDAR深度值的半监督损失公式。在KITTI数据集上评估了MonoRec,并表明与多视图和单视图方法相比,它具有最先进的性能。通过仅在KITTI上训练模型,MonoRec能够很好地推广到牛津RobotCar数据集和手持摄像机记录的更具挑战性的TUM-
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR2021,FFB6D:用于6D位姿估计的全流双向融合网络,代码开源
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
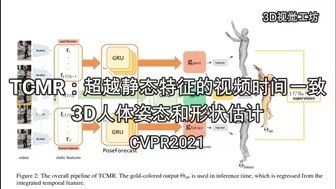
[CVPR2021] TCMR:超越静态特征的视频时间一致3D人体姿态估计
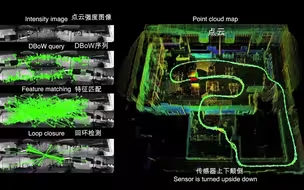
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
CVPR 2021,点云配准工作!循环多视图对齐网络的无监督表面点云配准!
重磅开源SA-GS:重新定位最新大场景3D重建SOT
CVPR 2021 HPS:无需外部传感器,大场景、长时间的动作捕获系统
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!
CVPR2021:SOLD2 - 自监督遮挡感知的线特征提取和检测
CVPR2022 基于神经网络的3D重建
[ICCV2021] DSEC:用于驾驶场景的双目事件相机数据集
[CVPR2022] StyleMesh:室内 3D 场景重建的风格转移
室内动态变化场景中的相机重定位(CVPR2021)
Depth Anything!最强开源单目深度估计SOTA!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
CVPR2021,结构光低计算成本准确恢复分段平面场景
浙大+商汤联合工作,LoFTR:利用transformers对稀疏纹理进行匹配(CVPR2021)
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
什么?不做时间同步也可以实现LiDAR-相机三维重建?
视觉快速定位与实时稠密简图简介
CVPR2022 用于城市环境重建的NERF
ICRA2024 牛津提出NeRF融合激光雷达SLAM的大场景重建
ICCV 2021:几行代码实现性能提升,目标检测中的旋转不变性
最新CVPR2020论文:用AI还原3D照片(Facebook研究,效果惊艳,代码开源!)
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
NeurIPS 2021:利用神经网络从单个 RGB 图像重建全景 3D 场景
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
IROS 2021,使用事件相机对电力线路进行巡查,线路寿命增加十倍!代码开源!
CVPR2022 BEVFormer:通过时空Transformer从多相机图像中学习鸟瞰视角表示
CVPR2022 浙大开源,NICE-SLAM:一种隐式神经可扩展编码 RGB-D SLAM
CVPR 2022 基于曼哈顿世界假设的神经网络三维场景重建
国防科大最新 | DistGrid:基于分布式神经辐射场阵列的大规模场景重建
[CVPR 2021] 深圳市大数据研究院:根据文本描述进行三维物体定位
香港大学工作!CVPR2022:事件相机的自动对焦