V
主页
京东 11.11 红包
IROS2020,基于航空影像的自动驾驶汽车激光雷达定位
发布人
https://www.youtube.com/watch?v=vcY74Z9bOLk 使用 LIDAR 的传统定位技术依赖于从测绘车辆生成的高分辨率点云地图。维护此类地图所需的成本和工作量通常非常高,因为它需要大量昂贵的地图测绘车队。在这项工作中,我们提出了一种使用航空影像地图和基于 LIDAR 的定位技术,用于城市环境中的自动驾驶汽车,消除了开发和维护复杂的高清地图的需要。所提出的技术,目前已经在从密歇根州安娜堡进行了测试!具体效果请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
大家air3s激光雷达幕后揭秘
新颜控智驾轿车AION RT初体验,大空间、激光雷达、快充长续航统统安排
清华大学研制可以侦测超高速导弹的激光雷达!!
[非完整版]透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM后端优化方法
带激光雷达的比亚迪!25款海豹加量又降价后它来辣
ECCV 2024 英伟达提出SAL:激光雷达分割一切!自动驾驶感知新技术!
四旋翼模型与控制基础
神奇!树脂+玻璃+手机就能制作3D全息投影?
BEV与Occupancy网络的全景解析与实战
基于ROS2的树莓派自主定位与导航小车
四旋翼无人机-PX4控制算法原理
自动驾驶中的深度学习模型部署实战-CUDA编程之内存访问、CUDA异步并行执行
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
四旋翼无人机-TD跟踪微分器原理与仿真
05 自动驾驶中多传感器信息融合理论(下篇)(Camera + LiDAR + Radar + IMU)
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(中篇)
Zier's vlog:大疆air3s的激光雷达真香!复杂环境起飞不怕炸鸡!追击air3s开箱
高通芯片被爆严重漏洞
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(一)
自动驾驶中实战基础之点云去畸变与对齐
具身智能!基础知识
PID控制器原理讲解
基于单张图片的3D人脸重建概述
上海 AI Lab开源力作!DriveArena: 首个基于生成模型的自动驾驶闭环仿真平台
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
北京网约车今天又爆单了!这是网约车司机的福利日还是灾难日? #网约车 #滴滴 #北京租车跑滴滴 #网约车司机
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
公开课 | 人脸识别经典损失函数介绍
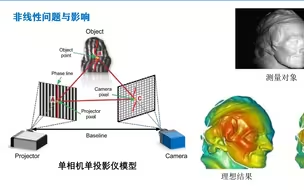
结构光的非线性问题与校正
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(中篇)
重磅更新!SD3.5!真正的开源可商用dit模型,20分钟全面讲解关于这个模型你需要知道的一切!
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
高速结构光三维面形测量方法
Claude自主操控电脑,漫天数据都能找,打工人泪目了
【2024汽车年会】自动驾驶:使用RoadRunner Scenario模拟城市环境中的自动驾驶
国产激光雷达厂商称霸,但激光雷达产业前景依旧严峻,如何开拓汽车场景外的新兴市场?