V
主页
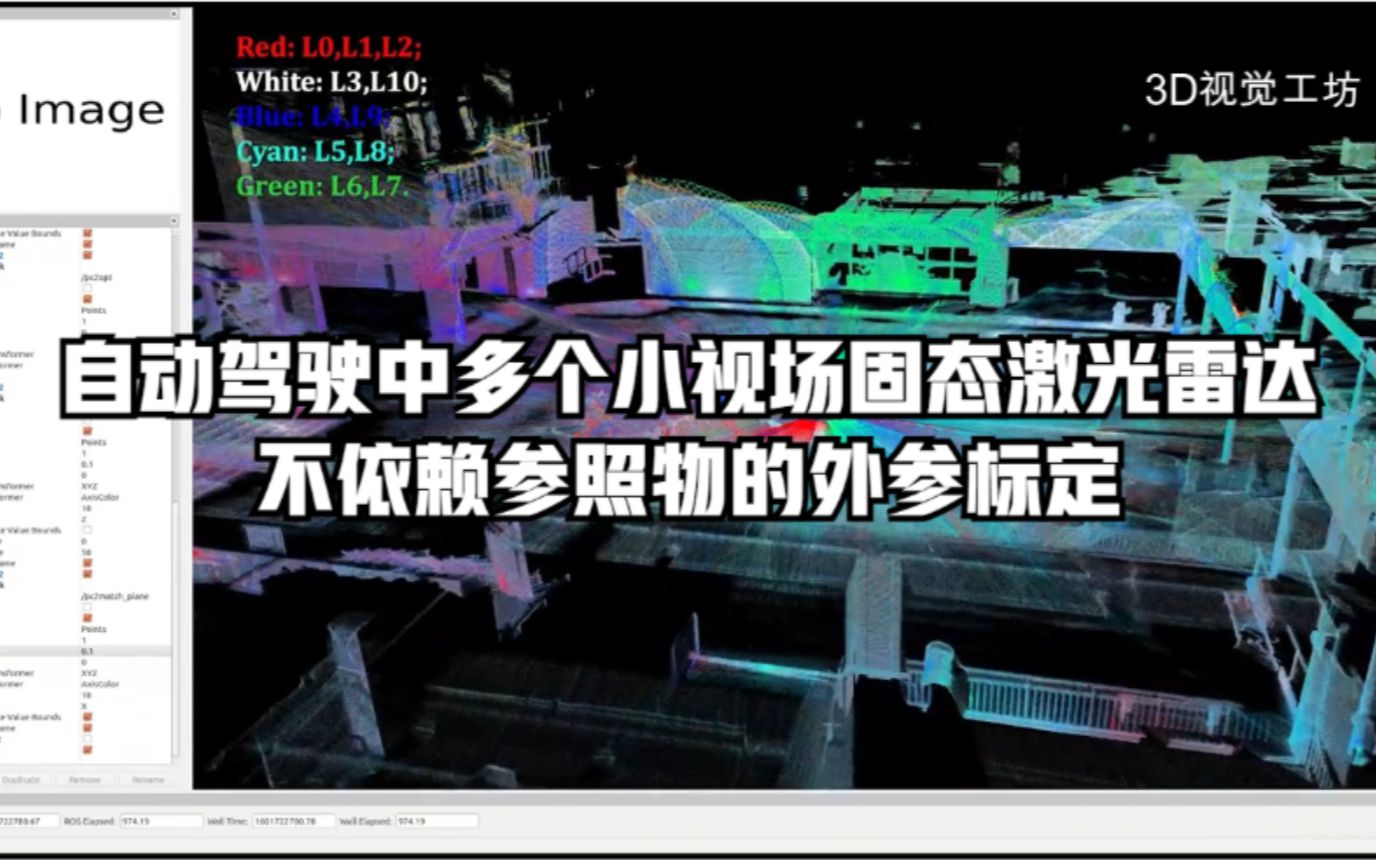
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
发布人
https://www.youtube.com/watch?v=SV9WfcQbq48 自动驾驶中,多雷达组合方案远比单雷达方案便宜、鲁棒性好,因为单雷达容易出现遮挡问题。但是由于其视场较小,多个雷达之间的联合标定会比较复杂。该方法适用于:雷达FoV重合很小(4.6°)、雷达完全没有FoV重合、多个小FoV雷达(11个)等情况,而且精度很高。简单概括为,通过360°旋转雷达平台,使每个雷达均扫描过同一片区域,再用每个雷达扫描到的点云,互相通过ICP匹配,直至点云重合收敛。具体效果请看视频。
打开封面
下载高清视频
观看高清视频
视频下载器
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
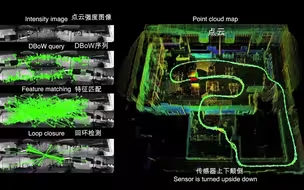
南洋理工大学: 使用固态雷达的轻量级3D定位和映射(代码开源)
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
NASA JPL团队CoSTAR一大力作:直接激光雷达里程计利用密集点云快速定位
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
TRO 2023 适用于高分辨率雷达的非光线投射占用栅格建图
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
ICRA2024 牛津提出NeRF融合激光雷达SLAM的大场景重建
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
香港理工大学最新工作:基于激光雷达的实时定位及网格划分
IROS2020,基于航空影像的自动驾驶汽车激光雷达定位
RAL 2023开源 第一个基于NeRF的实时LiDAR SLAM!
透彻剖析室内外激光SLAM算法与实战系列课程-室内激光SLAM建图定位实战
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
GPS信息丢失,利用3D语义信息来精准定位自动驾驶车辆位置,精度达到10m!
ICRA2020,卡内基梅隆大学机器人研究所,基于三维子图显著性的水下环境主动SLAM探测应用
港大火星实验室:在线 LiDAR 里程计的高效概率自适应体素映射
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
世界上第一个专为无人机集群设计的激光雷达惯性里程计框架
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
KITTI上准确率第二,具有GPU加速GICP匹配代价因子的全局一致的3D LiDAR映射
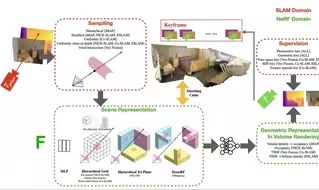
CVPR2024开源NeRF-SLAM新SOTA:请任意选择你的高效神经表征和渲染方程?
相机标定的基本原理与经验分享
这绝对是质量最高的单目深度估计开源方案!
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
专为机器人优化而生的固态激光雷达Velarray M1600
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
Hovermap,可手持、车载、机载的多平台智能SLAM数据采集系统
R2LIVE:稳健,实时,LiDar、惯性、相机的多传感器SLAM框架(代码开源)
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
北京航空航天大学:IROS2021基于交叉线的立体平面SLAM
ICCV 2023开源 屠榜Waymo!超强3D目标检测范式DetZero!
Open-Structure:TUM博士最新开源!很适合SLAM消融实验的结构化数据集!
ICCV 2023 oral|一文看懂SLAM/ SfM遇到相似非回环场景应该如何处理
闭环性能炸裂开源VADv2端到端矢量化自动驾驶新SOTA