V
主页
浙大&西交大等开源|使用贝叶斯核推理和优化的机器人自主探索!
发布人
在本文中,我们考虑在未知和复杂环境中提高基于信息的自主机器人探索的效率。首先利用高斯过程( Gaussian process,GP )回归学习一个代理模型来推断查询控制动作的富置信度互信息( confidence-rich Mutual Information,CRMI ),然后采用由CRMI预测值和预测不确定性组成的目标函数进行贝叶斯优化( Bayesian optimization,BO ),即基于高斯过程的贝叶斯优化( GP-based BO,GPBO )。可以实现具有最高CRMI值的最佳动作(利用)和具有高预测方差的动作(探索)之间的权衡。 论文地址:https://arxiv.org/abs/2309.05200 代码地址:https://github.com/Shepherd-Gregory/BKIO-Exploration
打开封面
下载高清视频
观看高清视频
视频下载器
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
波士顿动力机器人,要成精了!
哈工大、北师大、清华开源!逼真的3DGS人体化身
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
浙大&微软等新开源|随意移动,任一角度实现不同的光照效果!SIGGRAPH 2023
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
苏黎世皇家理工等发布!带闭环稠密神经SLAM
法国团队最新开源!3D高斯溅射可以生成三维网格啦!
第01讲 RTKLIB简介、安装、运行、调试(部分)
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
机器人【孤勇者】“总有一天,全宇宙的机器人都要高看我”
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
手把手带你入门SLAM
ETHZ开源|可与任何VIO前端兼容的SLAM通用后端!
经验分享:我的SLAM学习之路-答疑交流
7.4m/s相对速度自主规避,高效抵抗外部干扰!港大最新发布
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
【克隆机器人大乱斗】一条命通关弓箭挑战!
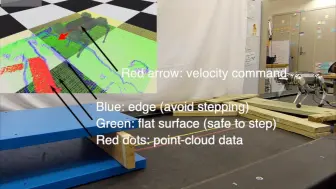
MIT机器狗在非结构化地形的视觉辅助动态探索!
开源一个半成品mp3,屎山代码,当练手玩一下rtos,后期还得加功能和优化
手把手教你学习标定基础知识
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
上科大与中科院联合开源!捕获情境环境中的多人多物交互
上科大、中科院联合开源!单目惯性感知的三维人物交互
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
华科、杭电与华为联合开源!实时动态场景渲染的4D高斯溅射
MIT最新开源|野外环境下,机器人的风险感知运动规划!
港中大最新开源|2D秒变3D,基于2D场景风格化的光线配准!CVPR2023
UIUC&Adobe开源|无需监督,使用解耦视频分割跟踪任何物体!ICCV2023
行走吧!机械臂!中国人自己的太空故事!
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
SLAM入门简介及ORB-SLAM2论文精讲
机器狗能拉重物!自适应CLF-MPC在四足机器人中的应用丨苏黎世联邦理工
【原创】上海为什么能够后来居上,成为人工智能人才的引力场?