V
主页
京东 11.11 红包
CTLO: Continuous-Time LiDAR Odometry
发布人
CTLO: Continuous-Time LiDAR Odometry 基于连续时间的纯激光里程计 GitHub:https://github.com/chengwei0427/CTLO 视频1:ZJU-H1测试数据 视频2:point-lio测试数据
打开封面
下载高清视频
观看高清视频
视频下载器
CTLO: Continuous-Time LiDAR Odometry
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
【开源】Livox Mid-360 with IESKF - LIO
对比point-lio,mid-360数据
optimize-lio
手持旋转扫描仪构图测试(alpha_lidar)
CT-LIO: Continuous-Time LiDAR-Inertial Odometry(库存视频)
自研2d激光动态构图(非cartographer)
手持mid-360多楼层LIO构图测试
动态点滤除demo
3d LiDAR Location test
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
从Navigation2开始的ROS2生活
Cont2-LeGO-LOAM,测试Cont2(2023 ICRA)及scancontext(2018 IROS)闭环
【开源】纯GPS定位,输出位置和方向(gnss_localizer)
optimization pose and rgb points
[开源]地面无人车lio-sam-modified构图
穷鬼大学生怒肝720小时!从底层到算法自制激光雷达+IMU融合的自主导航小车震撼演示
【开源】一种快速鲁邦的激光里程计方法
【开源】M-IESKF-LIO,基于迭代卡尔曼滤波的激光里程计(多激光同时构图)
轮式里程计激光里程计视觉里程计区别是什么
HM-LIO: A Hash Map based LiDAR-Inertial Odometry
未知环境探索——ROS2树莓派小车实时地图构建和导航
STD闭环测试
【开源】IESKF-LIO+Greedy based Feature Select
自研激光里程计,测试NCLT数据
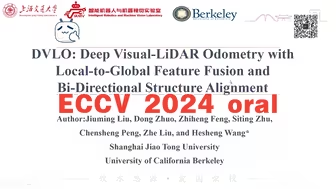
ECCV 2024 oral | 首次基于深度聚类的多模态融合里程计网络
手持mid-360隧道LIO构图测试
[开源]超全ICP实现,方便学习和对比测试
3D激光定位测试
空旷田野LIO测试
【开源】BoW3D-LeGO-LOAM,测试BoW3D(2022 RA-L)及scancontext(2018 IROS)闭环
【已开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计
【开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计(fast-lio2复现)
CT_LIO多激光构图测试
voxelmap-based LIO
L515构图测试