V
主页
京东 11.11 红包
CT-LIO: Continuous-Time LiDAR-Inertial Odometry(库存视频)
发布人
CT-LIO: Continuous-Time LiDAR-Inertial Odometry GitHub:https://github.com/chengwei0427/ct-lio
打开封面
下载高清视频
观看高清视频
视频下载器
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
CTLO: Continuous-Time LiDAR Odometry
optimize-lio
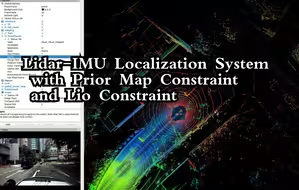
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
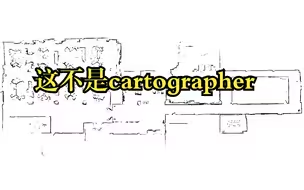
自研2d激光动态构图(非cartographer)
手持mid-360隧道LIO构图测试
手持旋转扫描仪构图测试(alpha_lidar)
【开源】Livox Mid-360 with IESKF - LIO
Cont2-LeGO-LOAM,测试Cont2(2023 ICRA)及scancontext(2018 IROS)闭环
optimize-lio
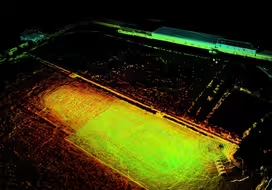
空旷田野LIO测试
STD闭环测试
3d LiDAR Location test
【开源】IESKF-LIO+Greedy based Feature Select
跨楼层构图效果展示
HM-LIO: A Hash Map based LiDAR-Inertial Odometry
动态点滤除demo
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
【已开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计
手持mid-360多楼层LIO构图测试
LIO部分退化场景构图测试
自研反光柱定位(ROS版)
SLAMesh增加去畸变对比测试
【开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计(fast-lio2复现)
【开源】Fast-lo 快速纯激光里程计
自研激光里程计,对比fast-lio2
基于LIO的车载VLP-16激光里程计
城市道路,5.7Km构图测试
[开源]超全ICP实现,方便学习和对比测试
自研激光里程计,测试NCLT数据
【开源】floam_g2o
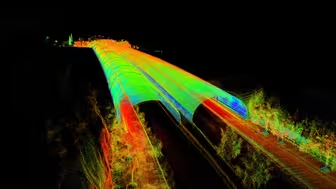
高速路lio测试
[开源]基于LIO的OS1-32激光里程计(手持,电瓶车城市道路采集)
【开源】SSL_SLAM3_modified测试
激光里程计最新成果展示
CTLO: Continuous-Time LiDAR Odometry
【已开源】fast_lio1.0版本适配传统多线激光
自研反光柱定位