V
主页
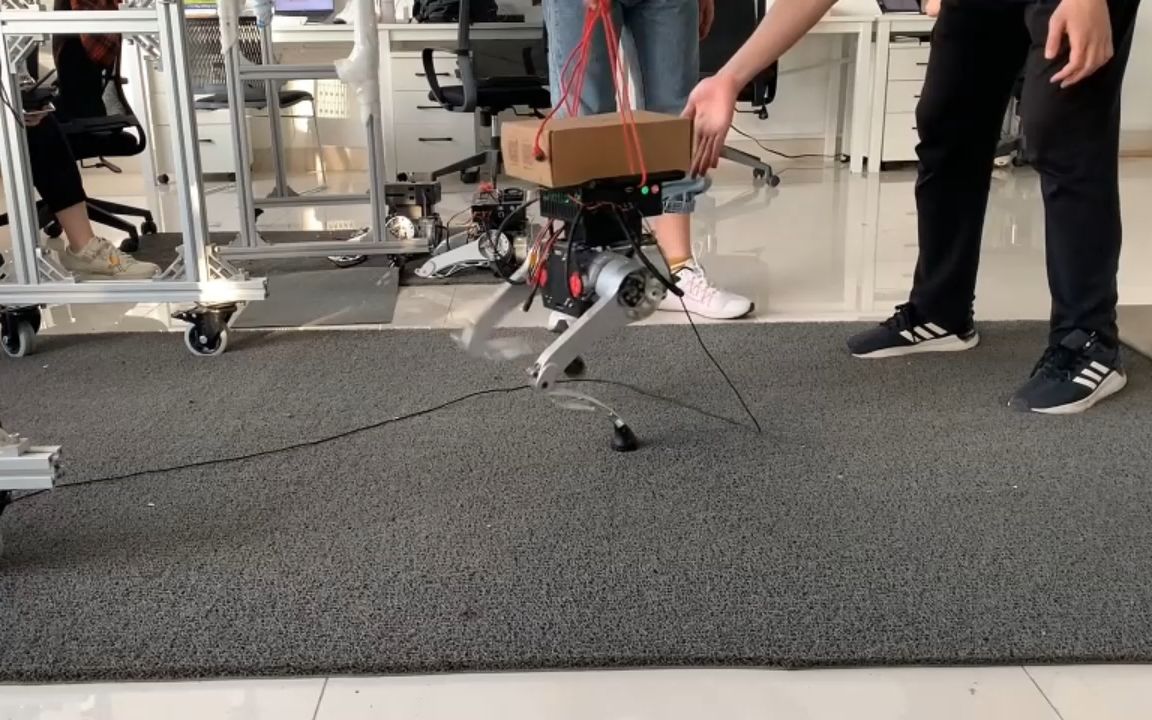
山东大学机器人中心电动腿足组 | 基于本体感觉的扰动抵抗控制
发布人
山东大学机器人中心电动腿足组 | 基于本体感觉的扰动抵抗控制 Z. Zhu et al., "Proprioceptive-Based Whole-Body Disturbance Rejection Control for Dynamic Motions in Legged Robots," in IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7703-7710, Nov. 2023, doi: 10.1109/LRA.2023.3322081.
打开封面
下载高清视频
观看高清视频
视频下载器
基于观测器的足式机器人MPC控制&BIROB专题征稿
山东大学机器人中心电动腿足组 | 双足机器人-BRAVER
山东大学机器人中心电动腿足组 | 轮式双足机器人-SKATER
山东大学机器人中心电动腿足组|人形机器人运动与全身控制
这种机器人可有人见过,好神奇!
最靠谱的机器人领域是什么?该怎么做?
人形机器人,精致、优雅、力量、阶段性成果ing……
轮足四足机器人 移动性的未来
山东大学机器人中心电动腿足组 | 双、四、六足机器人总动员
2015年5月美国麻省理工学院研制的猎豹II成为世界上第一个可以在跑动中自动跳跃障碍物的四足仿生机器人
山东大学机器人中心电动腿足组 | 基于深度强化学习的四足机器人多技能稳定学习
三种不同的机械臂传动设计
电科兔子上高台
浙江大学的人型机器人?!
南科大第二代点足式 双足机器人 (室外多地形行走测试)
【RoboMaster】当电控烧了份奇怪的代码be like
国庆机器人大阅兵
山东大学机器人中心电动腿足组 | 基于强化学习的双足机器人全向鲁棒控制
小鹏首发自研人形机器人
山东大学机器人中心电动腿足组 | 腿臂复用六足机器人
我制造了一只机器狗,并让它跳舞。 | I Built a Robot Dog and Made it Dance
国内首款大尺寸仿鸵双足机器人即将发布
C++ 瑞芯微RK3588 yolov5高达192帧
山东大学机器人中心电动腿足组 | 电动四足机器人
全国大学生机器人大赛,电子科技大学夺冠,开头一跳太惊艳了
健步如飞 atlas机器人奔跑最新视频 波士顿动态
给浙大控制机械狗宣传一下~
山东大学机器人中心电动腿足组 | 一种简捷的高机动轮腿复合式机器人Q-Whex
【首次公开】腾讯人工智能轮腿式机器人Ollie来了│360度空翻、跳跃、跃障、双轮平衡、多模态移动
机械臂内部居然是皮带传动的!
3D打印碳纤维到底有多硬?
【开源啦!】无刷轮腿平衡机器人
对标波士顿机器人出动敏捷机器人
世界一流的人形机器人,北理工团队!
工程师在迪士尼乐园测试小双足
波士顿动力公司机器人进化史
宇树发布: Unitree Go2 具身智能 新物种 9997元起
[开源]基于震动传感器的可击打检测装甲板-效果展示
波士顿动力机器狗vs国产机器狗 2023 ICRA
【南工骁鹰|规则预测】老队员倾情制作!FLASH演示动画