V
主页
具身智能公司-大疆
发布人
具身智能公司-大疆
打开封面
下载高清视频
观看高清视频
视频下载器
具身智能常用AI工具-必看
具身智能公司-宇树科技
具身智能课程-pybullt仿真器学习第三课搭建自己的具身智能学习平台
具身智能公司及产品的讨论
具身智能-通用抓取综述(learningl base 端到端派)
具身智能技术综述上
入门机器人Diffusion Policy
大模型在具身智能中的应用
具身智能综述下
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
Lerobot项目介绍和实操效果
具身智能课程-pybullt仿真器学习第一课
具身智能公司合集-智元机器人
具身智能-通用抓取综述(model base 3D视觉派)
具身智能领域最容易落地的方向-遥操作
2025顶会热点!三小时带你吃透【具身智能】 ,第二讲——LLMS for robotics
RLBench官方教程1——界面和代码框架介绍
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
人形机器人及具身智能创新论坛暨人形机器人具身智能标准发布会在沪顺利举办
全网最专业Figure 02视频讲解
MoveIt与Isaac Sim结合使用
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
30元教你学会用Issac gym训练宇树机器狗试听第一期
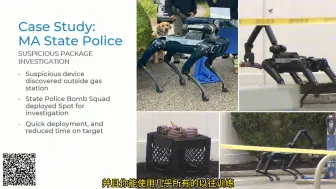
移动机器人从研究到现实的应用(波士顿动力)
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
【36氪】机器人暴打机器人?现在的行业风口具身智能到底是个啥?
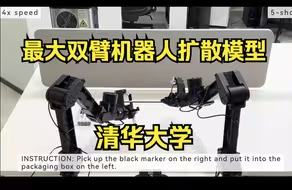
RDT-1B:解密全球最大的双臂机器人扩散大模型
NVIDIA Robotics: 从云端到边缘的AI驱动创新
《具身智能入门与 gym 仿真实战 》人形机器人 | 四足狗 | 运动控制【课程试看】
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
浙大Fast-Lab高飞老师 详解第二届ARTS 自主机器人技术研讨会
物理AI、机器人与自主性的未来:NVIDIA的全面技术布局
具身智能课程-pybullt仿真器学习第二课
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
清华重磅开源RDT-1B:全球最大双臂机器人扩散基础模型
清华赵明国:智能人形机器人≠智能+人形 | 智者访谈
李飞飞学生联合创立,高密度科学家团队,灵初智能完成天使轮融资
2040年100亿人形机器人?埃隆·马斯克的未来预言
PI:通用机器人控制的VLA流模型
MaskedMimic:基于物理的统一人形机器人角色运动控制|2024【nvidia】