V
主页
京东 11.11 红包
星尘机器人预告片全面解读-最强柔顺人形
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
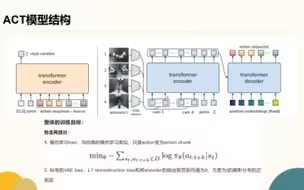
斯坦福ACT算法原理2-ACT模型
具身智能基础简述
全网首个灵巧手课程-灵巧手综述
李飞飞团队最新成果,基于大模型的机械臂抓取
遥操作库Humanoid Arm Retarget详解(作者王文灏主讲)
具身智能课程-pybullt仿真器学习第二课
具身智能领域最容易落地的方向-遥操作
入门机器人Diffusion Policy
具身智能课程-pybullt仿真器学习第一课
具身智能-通用抓取综述(model base 3D视觉派)
30元教你学会用Issac gym训练宇树机器狗试听第一期
具身智能常用AI工具-必看
斯坦福ACT算法原理1-生成式模型(具身智能)
特斯拉机器人最新展示
具身智能公司-大疆
具身智能课程-pybullt仿真器学习第三课搭建自己的具身智能学习平台
Diffusion Policy 结合 PPO 模仿+强化 (下)
星尘智能全能家居宣传片全网最全技术亮点解读
0基础学习具身智能第一步,仿真数据使用
具身智能技术综述上
【论文分享】GR-2和何恺明具身智能首作
特斯拉机器人新作-工厂内视觉导航
通用抓取 ----2D图像分割
具身智能综述下
具身智能-通用抓取综述(learningl base 端到端派)
RDT-1B:解密全球最大的双臂机器人扩散大模型
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
这只机器狗成精了 | 像人一样爬梯子 | 欧洲最强机器狗 ANYmal | 具身智能 | 神经网络 | 人工智能 | 四足机器人
30元教你学会用Issacgym训练宇树机器狗试听第二期
具身智能公司合集-智元机器人
MaskedMimic:基于物理的统一人形机器人角色运动控制|2024【nvidia】
具身智能行业资料分享计划
【研三】自研多模态大模型架构——长时程、高鲁棒
【直播回放】具身智能系列之感知技术课程
三分钟了解具身智能(18分钟版
宇树科技量产人形机器人
我跟你们这群研究机械臂的拼了!竟然连体感追踪都整上了
记录从零驯服双足机器人day24
Talk|慕尼黑工业大学翟光耀:SG-Bot - 基于场景图生成式模型的机械臂操作和物体重排
Meta AI 推出新一代SAM 2 可实时在图像或视频中识别出特定对象并进行跟踪