V
主页
伪激光雷达SLAM建图
发布人
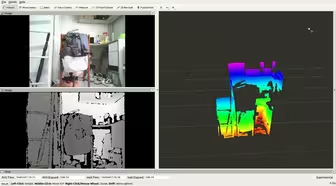
试了一下把深度相机得到的深度图降维成2D激光雷达信息,其实就是在深度图中选一个高度获取深度信息。这算是把相机的速度慢和2D激光雷达信息少的缺点都集合完了……目前还没发现有什么价值……
打开封面
下载高清视频
观看高清视频
视频下载器
4大2D激光SLAM对比
深度相机之彩色图+深度图+点云图
重新正常的激光雷达扫图
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
大疆livox-mid360定位
ROS机器人基于gmapping的slam自动导航建图!
用rtab-SLAM+gmapping建实验室稠密点云地图
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
无人机室内自主飞行,和地面站操作
激光slam在林业树冠,胸径,冠幅,株树等方面应用,激光雷达扫描
【3D数学】欧拉角万向节死锁与插值
玩把防守局,看对手撞得都替他心疼
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
ORB-SLAM3有必要学吗
[ICRA 2024] GCM
对方司令:我狗那么久还没吃过人,好不容易撞一次居然还是炸弹!?
视觉SLAM的本质多视图几何
用sc_lego_loam建广西大学机械楼前的三维点云地图
房屋平剖立面绘制,激光雷达点云教学,激光slam教学
激光slam精度验证,强光环境地面点精度,RTK参数转换大地高转85高,精度验证
搞SLAM算法为什么要学李群和李代数
敌方军旗已暴露,全军冲锋!
还在奇怪这师长怎么那么猛,原来是上把的人,那简单了~
军旗萌新的第一场胜利,你们司令都当地雷用的?
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
明明我也能赢挺多,为什么摆脱不了新手区呢
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
2022年,起点是:用kitti数据集跑通suma++语义SLAM,今年目标:顺利毕业,努力工作,佛系生活,技术宅
2025年工创赛 物流搬运机器人 全流程调试
CAD-Mesher: A Convenient, Accurate, Dense Mesh-based Mapping Module in SLAM for
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
阿木SU17在无GPS弱光环境下依靠四目SLAM定位飞行展示
开局先送对面两个师长,这把稳了
一雷不挖,一旗不取,但是赢了
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
套件课程--LIO-SAM的介绍和使用