V
主页
京东 11.11 红包
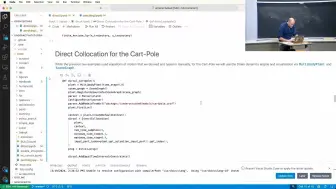
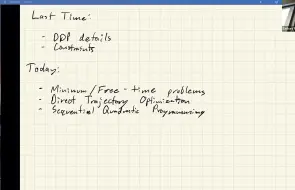
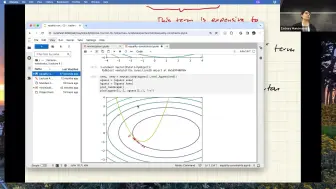
CMU 最优控制 2024 第 14 讲 Optimizing Rotations
发布人
Lecture 14 for Optimal Control and Reinforcement Learning 2024 by Prof. Zac Manchester. Topics: - Quaternion recap - Differentiating with respect to quaternion variables - Optimization with quaternion variables
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 最优控制 2024 第 7 讲 线性二次调节器的三种方法
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
CMU 最优控制 2024 助教补充 第 7 讲
2024 斯坦福 凸优化教程 Stephen Boyd 第三讲
CMU 最优控制 2024 第 8 讲 可控性和动态规划
CMU 最优控制 2024 助教补充 第 2 讲 牛顿法和受约束优化
CMU 最优控制 2024 第 9 讲 凸 MPC
教程:使用 CVXPY 进行凸优化 - SciPy 2022
CMU 最优控制 2024 第一讲
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
CoRL 讲座 - 基于仿真学习的具身智能
MIT 欠驱动机器人学 2024 第 8 讲 Computing Lyapunov Functions I
「精校熟肉」Optimal Control-最优控制(CMU 16-745) 2024-L5-优化(下)
实时最优控制讲座 —— 从航空航天的角度
CMU 最优控制 2024 第 19 讲 卡尔曼滤波器和二重性
CMU 最优控制 2024 第 13 讲 Dealing with 3D Rotations
MATLAB - 使用 RRT 算法路径规划(官方出品)
CMU 最优控制 2024 第 12 讲 直接轨迹优化
NVIDIA Isaac 讲座 —— 使用 ROS 2 控制自主移动机器人
开源机器人灵巧手(Jetson Nano)教程
CMU 最优控制 2024 助教补充 第 8 讲
多伦多大学 —— 四旋翼动力学与控制
波士顿动力创始人 Marc Raibert 关于机器人未来的采访
2024 斯坦福 凸优化教程 Stephen Boyd 第一讲
实时最优控制讲座 —— OCS2 教程
CMU 最优控制 2024 助教补充 第 2讲 KKT 条件和增量拉格朗日
2024 斯坦福 凸优化教程 Stephen Boyd 第 6 讲
机器人逆运动学示例
2024 斯坦福 凸优化教程 Stephen Boyd 第 18 讲
CMU 最优控制 2024 第 18 讲 随机最优控制和 LQG
CMU 最优控制 2024 第 1 讲
CoRL 讲座 - 为真实世界的部署制定仿真基准
USC 机器人讲座 —— 提高人机交互的效率和鲁棒性
CMU 最优控制 2024 第 4 讲 Optimization Pt 2
MIT 欠驱动机器人学 2024 第 9 讲 Computing Lyapunov Functions II
CMU 最优控制 2024 助教补充 第6讲 轨迹优化
ROS2 Actions [1H Crash Course]
MATLAB - Understanding Kalman Filters 官方出品
人形机器人量产临近,深度梳理5家核心公司
【破解深度学习】1.2 一句话讲清CNN、RNN、Transformer的区别