V
主页
京东 11.11 红包
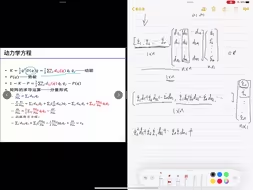
空间机器人技术-建模与控制基础:20.奇异性
发布人
这是面向大三学生的入门课程,视频作为课堂教学的补充。目前仅录制了固定基座机械臂的运动学部分。水平有限,请多指教~ 典型的奇异构型: https://www.bilibili.com/video/BV1fE41167Zz W.斯庞, 马克. 机器人建模和控制. 或者英文版,Robot dynamics and control 2nd Edition (2004). 以及 Modern Robotics Mechanics , Planning , and Control (2017).
打开封面
下载高清视频
观看高清视频
视频下载器
空间机器人技术-建模与控制基础:19.线速度的雅克比矩阵
空间机器人技术-建模与控制基础:11.最少坐标系的选取原则
空间机器人技术-建模与控制基础:18.角速度的雅克比矩阵
空间机器人技术-建模与控制基础:10.运动学简介
空间机器人技术-建模与控制基础:22.末端力与关节力之间的关系
空间机器人技术-建模与控制基础:9.齐次矩阵
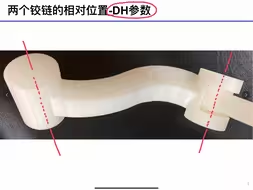
补充2.2_空间机器人技术-动力学与控制-DH参数的物理意义
空间机器人技术-建模与控制基础:21.速度级逆运动学
空间机器人技术-建模与控制基础:16.速度级运动学的基本内容
空间机器人技术-建模与控制基础:2.刚体的位置和姿态
空间机器人技术-建模与控制基础:5.旋转矩阵的作用-坐标转换
空间机器人技术-建模与控制基础:7.旋转的复合
补充1.2_矢量运算(空间机器人技术-动力学与控制-补充材料)
补充5.2-空间机器人技术-动力学与控制-转动惯量
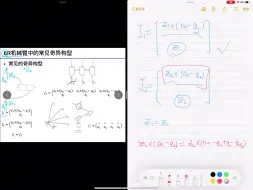
补充2.5-空间机器人技术-动力学与控制-机械臂中常见的奇异构型
空间机器人技术-建模与控制基础:17.线速度和角速度
空间机器人技术-建模与控制基础:6.旋转矩阵的作用-矢量的旋转
空间机器人技术-建模与控制基础:14.位置级逆运动学
补充2.1_空间机器人技术-动力学与控制-旋转矩阵-相似变换
空间机器人技术-建模与控制基础:4.旋转矩阵的性质
补充2.4_空间机器人技术-动力学与控制—角速度2
补充5.1-空间机器人技术-动力学与控制-动力学方程推导中的求和符号
补充2.3_空间机器人技术-动力学与控制-DH坐标系与DH参数
补充视频:阻抗控制-人形机器人
空间机器人技术-建模与控制基础:1.概述
一台PLC控制箱的制造全过程
补充视频:机器人控制-深度强化学习
补充视频:ABB 机械臂高级运动控制
舞蹈艺考生日常练习397
我国又一项黑科技亮相,西工大这次立了大功,或将彻底改变航太格局
学了plc如何做第一个工控项目?从需求分析到项目验收,项目全过程讲解!
[分享]| 为什么Arduino没有广泛应用于工业?
补充4.1-轨迹规划——国际空间站加拿大II臂运动视频
炫酷、炸裂,双足机器人进化#双足机器人#机器人
看哈工大学生做出的黑科技 | 格斗机器人拿下国际大奖
AK电机又立大功!仿人腿弹跳机器人StaccaToe
100 个传奇迷你变形金刚机器人伪装一步变身器:STOPMOTION 威震天 x 擎天柱
补充视频:人机协作机器人ABB yumi组装零件
马斯克宣布特斯拉机器人Optimus Gen将于12月发布!3大升级!
柔性参数计算part1-导出有限元数据——如何计算模态耦合系数(模态动量系数、模态角动量系数、惯性完备性准则)