V
主页
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
发布人
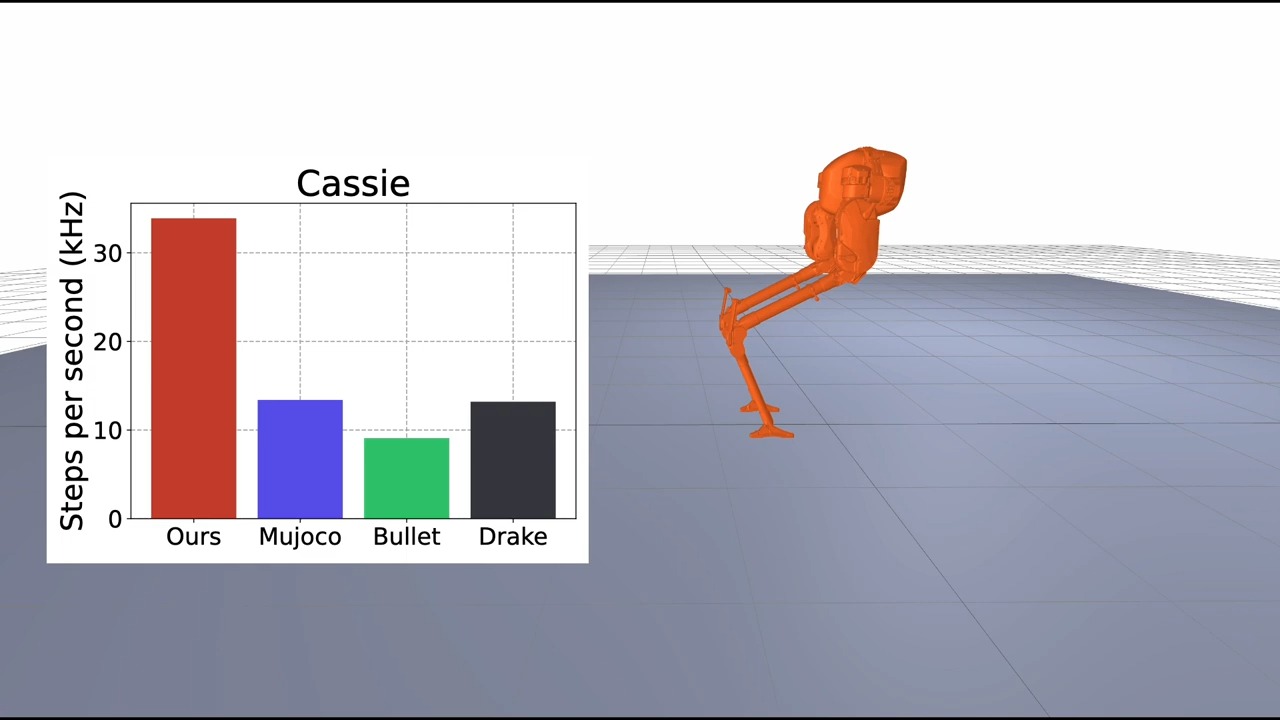
https://www.youtube.com/watch?v=i_qg9cTx0NY From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach Whether rigid or compliant, contact interactions are inherent to robot motions, enabling them to move or manipulate things. Contact interactions result from complex physical phenomena, that can be mathematically cast as Nonlinear Complementarity Problems (NCPs) in the context of rigid or compliant point contact interactions. Such a class of complementarity problems is, in general, difficult to solve both from an optimization and numerical perspective. Over the past decades, dedicated and specialized contact solvers, implemented in modern robotics simulators (e.g., Bullet, Drake, MuJoCo, DART, Raisim) have emerged. Yet, most of these solvers tend either to solve a relaxed formulation of the original contact problems (at the price of physical inconsistencies) or to scale poorly with the problem dimension or its numerical conditioning (e.g., a robotic hand manipulating a paper sheet). In this paper, we introduce a unified and efficient approach to solving NCPs in the context of contact simulation. It relies on a sound combination of the Alternating Direction Method of Multipliers (ADMM) and proximal algorithms to account for both compliant and rigid contact interfaces in a unified way. To handle ill-conditioned problems and accelerate the convergence rate, we also propose an efficient update strategy to adapt the ADMM hyperparameters automatically. By leveraging proximal methods, we also propose new algorithmic solutions to efficiently evaluate the inverse dynamics involving rigid and compliant contact interactions, extending the approach developed in MuJoCo. https://github.com/Simple-Robotics/Simple https://hal.science/hal-04588906 https://roboticsconference.org/
打开封面
下载高清视频
观看高清视频
视频下载器
【通用】人形机器人RL策略Gazebo二次仿真框架
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
人形机器人灵巧手臂最新成果
真牛!这个人形机器人吊打很多厂家的“产品”
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
双足机器人步态生成 MATLAB and Simulink
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
Control is dead ?control+ learning才是未来
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
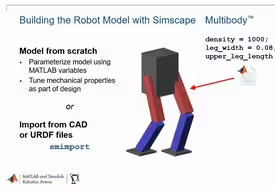
双足机器人的建模与仿真 MATLAB and Simulink
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
Panoptic-SLAM:使用全景分割的动态环境中的视觉 SLAM 代码已开源
基于分层优化的四足机器人全身运动控制搬运重物
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
上电驱?波士顿动力Atlas向液压说再见?不会再爱了!
单腿站立 轻轻松松 Atlas KarateKid
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
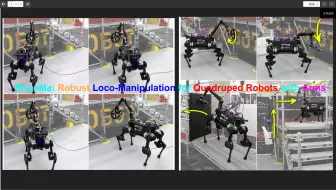
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
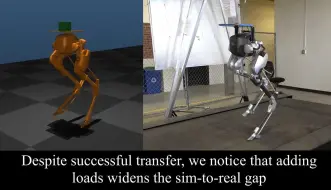
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
MimicTouch:利用多模式人类触觉演示实现丰富的接触式操作
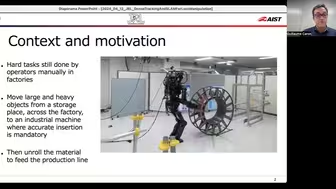
ICRA 24 Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Humanoids
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
8分钟内了解波士顿动力机器人30年的整个演变
DTC: Deep Tracking Control 1
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
【论文复现】移动机械臂协同控制(三)——UR5e实物控制
心善的波士顿动力见不得美军吃一点苦
印度的四足机器人 看着还可以哦
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
CasADi 3.6 tutorial (C++ Matlab Python)