V
主页
京东 11.11 红包
【机器人学导论课程】台湾大学林沛群教授_人工智能AIoT(Robotics)学习参考教程,现整理分享给大家!
发布人
https://www.coursera.org/learn/robotics1/home/welcome 课程信息 本课程主要在学习机械手臂在分析面的运动学和轨跡规划。 学习目标: 1.了解物体在空间中运动的描述方式 2.了解多关节机械手臂的顺逆运动学 3.了解运动轨跡的规划方式。 大数据未来发展的七大趋势: (一)物联网 (二)智慧城市 (三)增强现实(AR)与虚拟现实(VR) (四)区块链技术 (五)语言识别技术 (六)人工智能(AI) (七)数字汇流
打开封面
下载高清视频
观看高清视频
视频下载器
(中英强推!)2024斯坦福最值得学习的【机器人学导论】通俗易懂秒上手!CS223A-Introduction To Robotics
机器人学导论 林沛群 (长视频版)
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
机器人学:建模、控制与视觉——华中科技大学
终于来了,机器人学习路线经验分享!华理学长毫无保留分享~
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
台大机器人学之运动学——林沛群(含课件+书籍)
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
机器人学导论 期末速成
最好! 最细!最干!的机器人学导论!学完即入门,台湾教授亲自录制!
台湾大学 林沛群——自动控制 自动控制原理 课程
【双语字幕】《机器人学导论》斯坦福课程视频
台大机器人学之动力学——林沛群
机器人学——李群、李代数快速入门
RoboMaster机器人基础 哈尔滨工业大学慕课2019
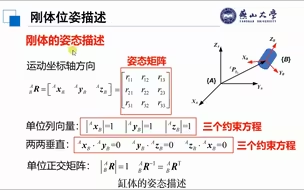
2-1位置和姿态的表示
机器人DH法、运动学、雅克比(Jacobian)矩阵
【东北大学】机器人基础原理_(房立金教授)
[中英文字幕] 首尔国立大学-机器人机构学与控制
『机器人技术』复习课
斯坦福大学公开课——机器人学
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
机器人学导论 MOOC
台大机器人学之运动学-林沛群(搬运)
【台大计算机系列】266集李宏毅、林轩田、陈蕴侬、林沛群、郭彦甫等名师联袂主讲,机器学习+深度学习+数据结构+算法+机器人运动+线性代数+数值计算+MATLAB
【公开课】“机器人学概述”+“机器人结构”| 华中科技大学:机器人学 01
【机器人基础】Introduction to Robotics@UCB
机器人学导论-第四章操作臂逆运动学
【中英字幕】现代机器人学 | Modern Robotics
【Autolabor初级教程】ROS机器人入门
【公开课】机器人学 Robotics(2016)
多地形上輪腳複合移動載台 林沛群
斯坦福公开课【机器人学导论】全网最好!最详细!最干!的机器人学导论!学完及入门,原著作者亲自录制!膜拜!——(人工智能、深度学习、神经网络、机器学习)
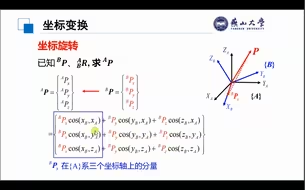
机器人学 l 2.2 坐标变换
加州大学伯克利分校 EE106A 机器人学导论 Introduction to Robotics(Fall 2019)
【机器人学导论课程】台湾大学林沛群教授-人工智能AIOT(学习参考教程) 致敬钢铁侠!!
[最热💥]关于人工智能(ALOT),台湾大学教授讲机器人学导论,速来围观!
东南大学 机器人原理及应用(共48讲)
【机器人学】1-数学基础-1.1-空间位置和姿态
斯坦福!【人工智能机器人学导论】B站最强!我愿称之为教学界的天花板,真不愧是顶级名校教授亲授!草履虫都看懂了!——(人工智能、深度学习、机器学习、神经网络)