V
主页
最好! 最细!最干!的机器人学导论!学完即入门,台湾教授亲自录制!
发布人
该视频资源来源于网络 如有侵权 请联系删除 本课程主要在学习机械手臂在分析面的运动学和轨跡规划。 学习目标: 1.了解物体在空间中运动的描述方式 2.了解多关节机械手臂的顺逆运动学 3.了解运动轨跡的规划方式。 大数据未来发展的七大趋势: (一)物联网 (二)智慧城市 (三)增强现实(AR)与虚拟现实(VR) (四)区块链技术 (五)语言识别技术 (六)人工智能(AI) (七)数字汇流
打开封面
下载高清视频
观看高清视频
视频下载器
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
【双语字幕】《机器人学导论》斯坦福课程视频
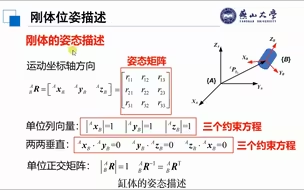
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
斯坦福公开课【机器人学导论】全网最好!最详细!最干!的机器人学导论!学完及入门,原著作者亲自录制!膜拜!——(人工智能、深度学习、神经网络、机器学习)
终于来了,机器人学习路线经验分享!华理学长毫无保留分享~
【机器人学导论课程】台湾大学林沛群教授_人工智能AIoT(Robotics)学习参考教程,现整理分享给大家!
机器人学导论 MOOC
机器人学:建模、控制与视觉——华中科技大学
斯坦福大学公开课——机器人学
机器人DH法、运动学、雅克比(Jacobian)矩阵
手把手教(不是“叫”)你制作一个代码开源、使用树莓派和Python驱动的六足机器人【预告】
【东北大学】机器人基础原理_(房立金教授)
600个小时,一个普通大学生能做出怎样的毕设
机器人建模和控制
机器人动力学拉格朗日法详细推导(二连杆机械臂)
【机器人学导论课程】台湾大学林沛群教授-人工智能AIOT(学习参考教程) 致敬钢铁侠!!
东南大学 机器人原理及应用(共48讲)
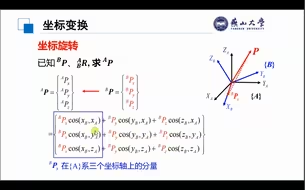
机器人学 l 2.2 坐标变换
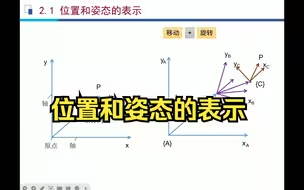
2-1位置和姿态的表示
[最热💥]关于人工智能(ALOT),台湾大学教授讲机器人学导论,速来围观!
机器人学导论 林沛群 (长视频版)
【开源】ROS机器人集群的仿真与实践详解七:规划与控制算法导论
【机器学习导论全套教程】第一次看到有人把机器学习导论讲的如此通俗易懂明白!
RoboMaster机器人基础 哈尔滨工业大学慕课2019
智能机器人系统(国防科技大学)
机器人导论 线上直播课 录屏
台大机器人学之运动学——林沛群(含课件+书籍)
专本硕都能入行机器人行业,缺口极大,待遇很好
机器人学基础20221114
4-2机器人速度雅克比矩阵与速度分析
MATLAB机器人工具箱10.4 机械臂仿真教学(未完结)
机器人学导论 期末速成
加州大学伯克利分校 EE106A 机器人学导论 Introduction to Robotics(Fall 2019)
机器人学导论
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
机器人学导论|2008|Oussama Khatib【Stanford】
机器人学 台达慕课
4-10机器人的静力分析
【机器人学】1-数学基础-1.1-空间位置和姿态
斯坦福!【人工智能机器人学导论】B站最强!我愿称之为教学界的天花板,真不愧是顶级名校教授亲授!草履虫都看懂了!——(人工智能、深度学习、机器学习、神经网络)