V
主页
『机器人技术』复习课
发布人
只因器人技术复习,考试不考运动学反解和动力方程,但依然漫长而煎熬,加油捏23333
打开封面
下载高清视频
观看高清视频
视频下载器
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
机器人技术基础(4)
机器人DH法、运动学、雅克比(Jacobian)矩阵
【公开课】山东科技大学:机器人技术与应用
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
《机器人学》期末考试复习课程来咯~【考前冲刺】
21级 机器人技术基础 齐次变换逆矩阵
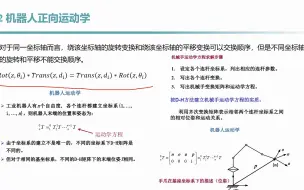
第四讲运动学03-机器人位姿分析
5.机器人感知
机器人技术基础(3.5)
机器人技术基础(1)
220610机器人学基础期末复习【莆田学院】
21级 机器人技术基础 一二章复习
【第3部分】机器人控制
2.机器人学的发展
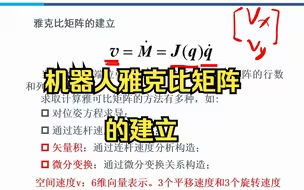
4-5机器人雅克比矩阵的建立
想搞机器人,学什么专业最好!
机器人技术基础(3)
智能机器人系统(国防科技大学)
机器人建模和控制
斯坦福大学公开课——机器人学
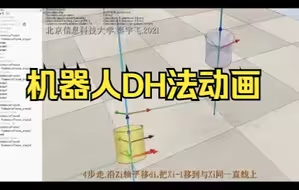
机器人dh法动画
工业机器人技术基础入门详解
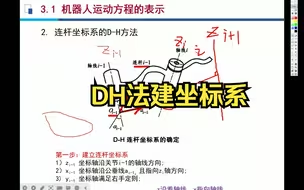
3-3DH法建坐标系
【公开课】“位姿描述和齐次变换”上 | 华中科技大学:机器人学 02
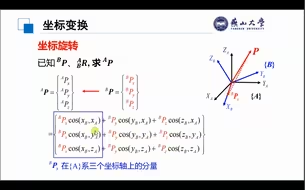
机器人学 l 2.2 坐标变换
机器人学基础20221114
【机器人机构学】第四章&第五章机器人自由度与运动模式分析知识点
机器人机构学 期末复习
《机器人学》1小时不挂科速成课【小考神】
3-1DH法的目标
4-1机器人速度雅可比矩阵
机器人技术
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
4-10机器人的静力分析
机器人学导论例2.2讲解
3.2 机器人DH参数表达法
北理工2022秋-机器人控制技术基础
ABB机器人官方入门到精通
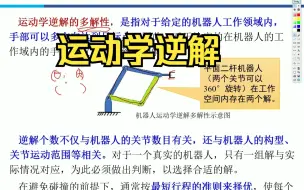
3-11运动学逆解