V
主页
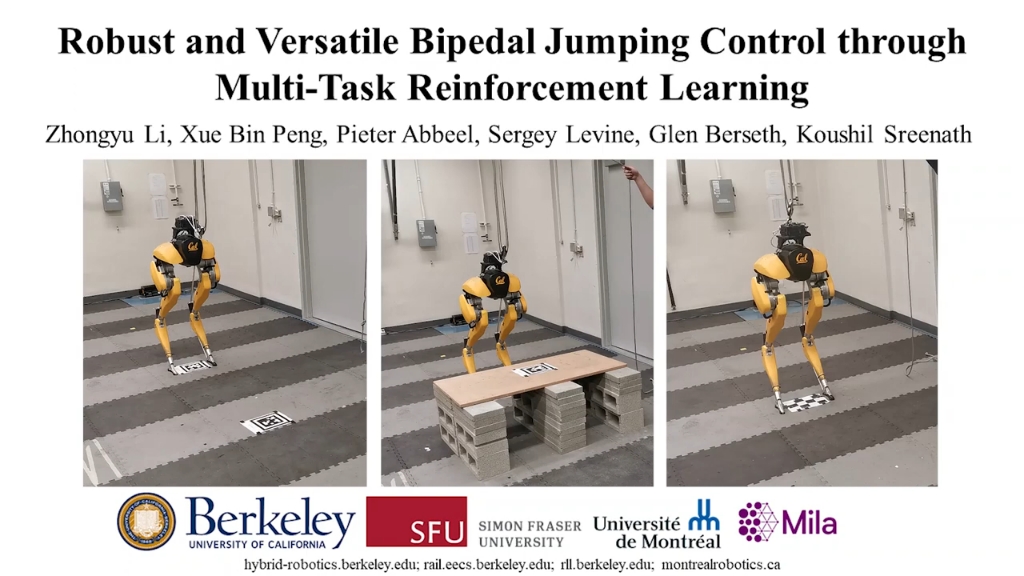
基于多任务强化学习实现稳健且通用的双足跳跃控制
发布人
https://www.youtube.com/watch?v=aAPSZ2QFB-E 这项工作旨在通过使扭矩控制的双足机器人在现实世界中执行稳健和多功能的动态跳跃来突破双足机器人的敏捷性极限。 我们提出了一个多任务强化学习框架来训练机器人完成各种各样的跳跃任务,例如跳跃到不同的位置和方向。 为了提高这些具有挑战性的任务的性能,我们开发了一种新的策略结构,该结构对机器人的长期输入/输出 (I/O) 历史进行编码,同时还提供对其短期 I/O 历史的直接访问。 为了训练多功能的多任务策略,我们采用了多阶段训练方案,其中包括针对不同目标的不同训练阶段。 经过多阶段训练后,多任务策略可以直接转移到物理双足机器人Cassie。 针对不同任务的培训和探索更多不同的场景会导致高度稳健的策略,这些策略可以利用各种学习技能从实际部署期间的扰动或不良着陆中恢复。 所提出的多任务策略的这种稳健性使 Cassie 能够成功完成现实世界中各种具有挑战性的跳跃任务,例如站立跳远、跳上高架平台和多轴跳跃。
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人上的电路板安装
大个头人形机器人
双足机器人奔跑实验与人步态“神同步”
双足被动动态行走机器人
仿人机器人ICRA2023
机器人运动前的准备 “活动筋骨”
通过强化学习可自适应多种地形奔跑
直腿双足机器人被动行走测试
用于虚拟现实中 NASA Valkyrie 人形机器人的运动和操纵控制的驾驶舱演示
六足机器人爬楼梯
TOYOTA 仿生机器人 T-HR3 演示
标新立异的仿生新势力EX机器人
有点像受伤后瘸腿的狗
防止与物体碰撞的机器人
RoboCup2022赛事人形成人NimbRo亮点
手眼协同控制机器人
双臂机器人Nextage从单纯的“设备”到成为“合作伙伴”
Valkyrie仿生双足机器人
用于创建动态运动控制算法的双足实验
带手臂的自主服务机器人
Digit类人机器人演示多机协同
两轮机器人 控制平衡之舞
Atlas双足机器人自主路径规划
同心轴3自由度机器人手腕
通用人形机器人Apollo
狗与机器狗 谁怕谁谁呢
家用货架搬运机器人
神奇的仿生飞行机器人
四足机器人通过强化学习巡检测试
监控机器狗
在铁轨上导航行走的机械狗
双足机器人 开普勒计划
跳跃玩法机器人强化学习
基于语义想象的经验扩展机器人学习
完全自主仓库飞行无人机系统
科幻卡通的通用机器人“魔法工具”
探索 | 双臂机器人使用剪刀✂️
机器人相聚游行汇演 ICRA2023
波士顿动力公司 30年的创新、探索 对行业影响不言而喻
用于管道自主巡检的蛇型机器人