V
主页
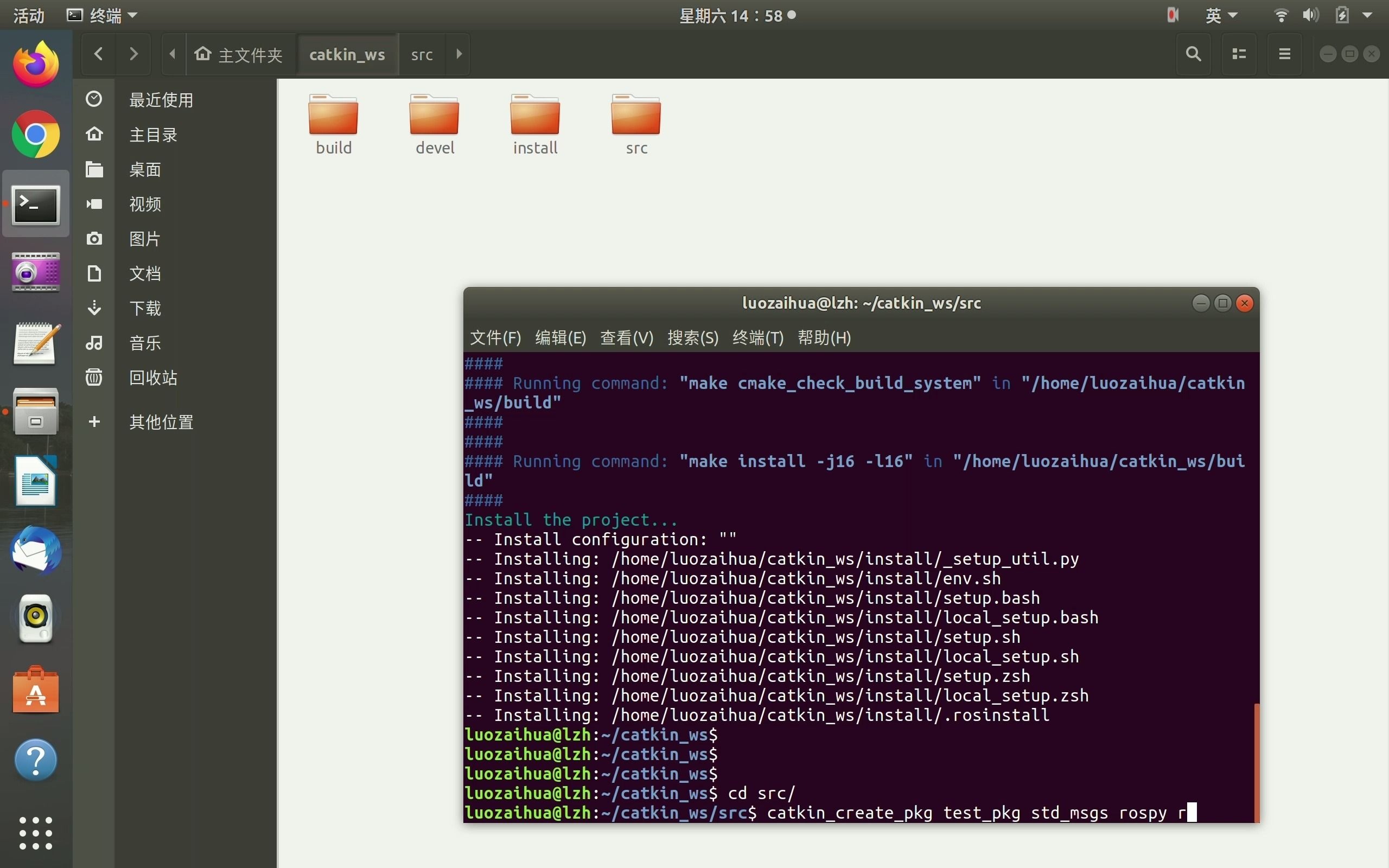
ROS学习(3)创建工作空间和功能包
发布人
创建工作空间和功能包特别重要
打开封面
下载高清视频
观看高清视频
视频下载器
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
ROS2基础教程(1):工作空间和ROS包
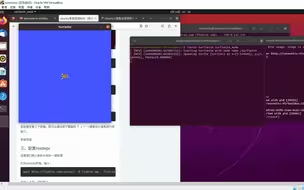
ROS学习(1)小乌龟
【跑一遍古月居ros教程】之 3 创建工作空间、功能包及编译的主要步骤总结
【Autolabor初级教程】ROS机器人入门
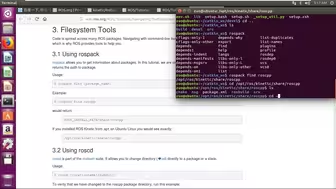
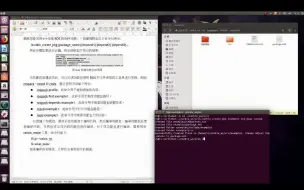
3.3 创建工作空间
ROS学习(14)移动机器人URDF模型
工作空间和功能包
手把手ROS(2)---ROS文件系统
【ROS自学分享】第一集:管理环境以及创建ROS的工作空间
1.ros创建功能包
ROS|Ubuntu20.04安装ROS Noetic全过程(从VMware虚拟机安装开始)
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
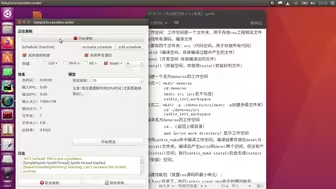
3.4 创建ROS功能包及功能包编译
ROS学习(4)发布者publisher的编程实现
ROS创建URDF机器人模型
ROS学习(5)订阅者Subscriber的编程实现
ROS学习1.终端命令下创建工作空间与执行C程序
ROS快速入门教程
【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统
ROS学习(2)命令行学习-话题记录与复现
ros功能包与工作空间简要操作。
机器人操作系统 ROS 快速入门教程
使用鱼香ROS一键安装
ros2创建功能包
ROS学习(8)服务端Service的编程实现
ROS学习2.终端下运行python程序
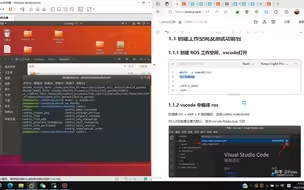
8.ROS 开发神器 Visual Studio Code 的安装和设置
ROS学习(13)launch启动文件的使用方法
黑马程序员_零基础玩转机器人操作系统ROS
ROS学习(6)话题消息的定义与使用
超精简8分钟ros入门教程,实战前够用的基础知识。茴字有四种写法,但你只要会一种
零基础学习ROS机器人操作系统
ROS2视频教程之如何创建ROS2的工作空间
70分钟快速入门Gazebo机器人仿真
ROS学习(16)移动机器人SLAM算法(gmapping)初试
ROS学习(15)机械手臂URDF模型
16.在ROS中,使用Python编写Publisher发布者节点
【古月居】ROS机器人开发实践
ROS小海龟跟随Python/C++快速实现