V
主页
【S1E02上】Figure 01背后的具身智能:解析VLM、基础模型、硬件与交互
发布人
具身智能指的是能理解、推理并与物理世界互动的智能系统。2024年3月13日,Figure AI与Open AI合作推出Figure 01人形机器人,最新视频展示出机器人惊人的理解、判断、行动和自我评估能力。而从OpenAI 宣布介入与之合作,到它们共同推出一个能够自主对话和决策的机器人,只有13天。 在人工智能领域,下一个重要挑战的国际共识即为实现具身智能(Embodied Intelligence)。全球范围内AI领域的巨头和风投机构的火力在今年也从软件卷入了门槛更高回报周期更长的硬件。我们也在这一期请到了机器人相关领域的三位博士生小伙伴,来跟我们分享机器人背后的视觉语言模型(VLM)、机器人领域的基础模型(foundation model)以及与之对应的精密的人形机器人都是什么?机器人与人的交互和“世界模型”又是怎样的?机器人精密控制的硬件是如何实现的? 商务合作/加入团队/嘉宾报名:exodus.tech.media@gmail.com 意见反馈/加听友群:搜公众号“出埃及记Exodus” 小红书/视频号/B站/X/小宇宙/Podcast/Spotify全网同名
打开封面
下载高清视频
观看高清视频
视频下载器
大模型在具身智能中的应用
物理AI、机器人与自主性的未来:NVIDIA的全面技术布局
2025顶会热点!三小时带你吃透【具身智能】 ,第二讲——LLMS for robotics
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
清华重磅开源RDT-1B:全球最大双臂机器人扩散基础模型
具身大模型新进展:星尘智能与π0官宣合作,最强AI机器人再进化!
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
手写DiffusionPolicy【1】:最简单的机器人操作
Lerobot项目介绍和实操效果
吹爆!这绝对是中国科学院最出名的科研进阶教程了没有之一,零基础阶段必看的论文写作指南,小白也能很好懂!
【S1E01 下】Claude Grok大模型卷生卷死,AI安全性与计算效率路在何方
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
【清华机器人】机器人迈向ChatGPT时刻!清华团队首次发现具身智能Scaling Laws
节奏盒子:灰色身体穿着黄色衣服的机器人
【S1E01 上】Claude Grok大模型卷生卷死,AI安全性与计算效率路在何方
2025顶会热点!三小时带你吃透【具身智能】 ,第一讲——什么是具身智能?
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
【直播回放】从自动驾驶到具身智能漫谈
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
2040年100亿人形机器人?埃隆·马斯克的未来预言
多模态大模型是如何重塑具身智能的?
AI 大模型周报 2024年11月 b
Meta推进具身AI:触觉感知与人机交互的突破性进展
清华赵明国:智能人形机器人≠智能+人形 | 智者访谈
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
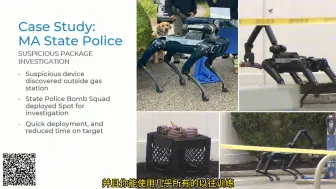
移动机器人从研究到现实的应用(波士顿动力)
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
【36氪】机器人暴打机器人?现在的行业风口具身智能到底是个啥?
Meta开源视觉触觉感知方案
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
MoveIt与Isaac Sim结合使用
【很强】YOLO+深度+雷达=动态检测
Lec10-1: 强化学习Overview (现代控制、MPC、强化学习的概览)
RLBench机器人模仿学习大规模测试框架——任务展示
用Isaac Lab和OpenUSD加速机器人学习
使用Isaac Sim和ROS2控制机器狗指南
PI:通用机器人控制的VLA流模型