V
主页
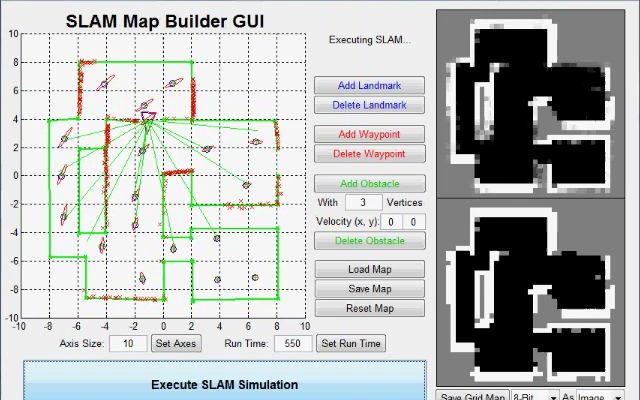
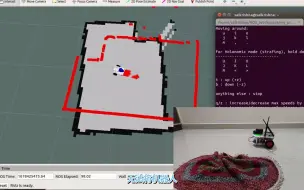
使用扩展卡尔曼滤波器在 MATLAB 中生成的 SLAM 模拟。该实现从激光扫描匹配和车轮里程计生成两个运动估计
发布人
使用扩展卡尔曼滤波器在 MATLAB 中生成的 SLAM 模拟。该实现从激光扫描匹配和车轮里程计生成两个运动估计。由此产生的姿态估计是两个估计的加权平均值,它考虑了它们的相对不确定性。更新步骤使用人工地标,例如放置在环境周围的 RF 信标以进行姿势校正
打开封面
下载高清视频
观看高清视频
视频下载器
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
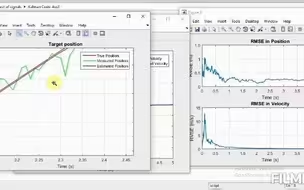
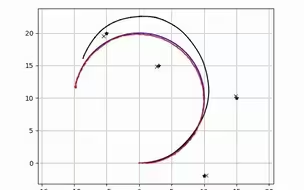
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
第 1 部分:MATLAB 中的蒙特卡罗模拟(教程)
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
239:一分钟搞定EKF(扩展卡尔曼滤波)_UKF(无迹卡尔曼滤波)_PF(粒子滤波)三种算法的估计结果
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
使用 MATLAB/Simulink 模拟太阳能电池
使用 MATLAB Simulink 模拟无人机
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
MATLAB 中的 ECG 信号处理 - 检测 R 峰并从他的心电图信号计算一个人的心率
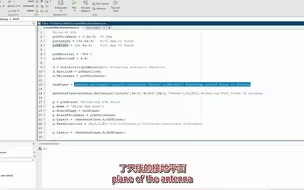
如何使用 MATLAB 设计微型贴片天线 | 微带天线设计
基于扩展卡尔曼滤波器ekf的 SLAM
第 2 部分:MATLAB 中的蒙特卡罗模拟(教程)
MATLAB 中的船舶设计和仿真
多体弹簧-质量-阻尼器系统的运动方程和 MATLAB/Python 仿真
并联式混合动力汽车能量管理动态规划的实现matlab算法
在 MATLAB 中绘制多元方程。使用 MATLAB 绘制 3D 曲面图
MATLAB 串口示波器和 IMU 姿态显示 STM32 Serial Oscilloscope and Cube
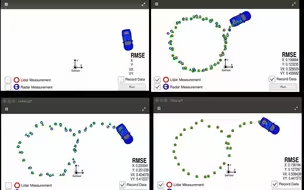
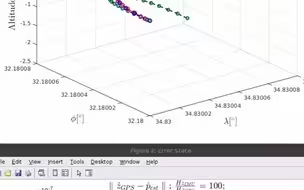
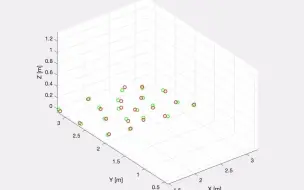
EKF SLAM 在低噪声测量下使用来自机器人的模拟数据 EKF 状态由机器人姿态和地标位置组成。机器人能够成功地关闭循环并纠正地标估计位置
随机森林分类-MATLAB算法示例
线性最小二乘估计的MATLAB程序| [估计与跟踪]
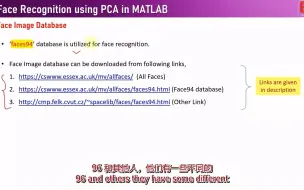
在 MATLAB 中使用 PCA 进行人脸识别算法
使用 MATLAB Simulink 对车辆 HVAC 系统进行建模和分析汽车车载空调建模
MATLAB 中的电磁波可视化
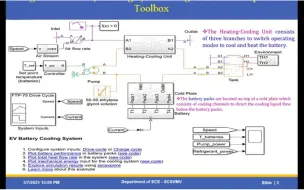
使用 Matlab Simulink 设计与实现电动汽车 (EV) 电池冷却系统
基于invariant EKF 的 SLAM 机器人状态估计
移动自主机器人中的传感器融合| IMU+车轮里程计
弹簧质量阻尼器系统建模与仿真 MATLAB
朴素贝叶斯分类器 MATLAB 实现
simulink 多体弹簧质量系统 | MATLAB 教程质量阻尼器系统进行建模
使用 MATLAB 绘制动画 2D 和 3D 图
空旷田野LIO测试
使用LSTM实现回归和预测 matlab
使用 SIMULINK MATLAB 进行直流电机仿真
MATLAB 上的感知器算法