V
主页
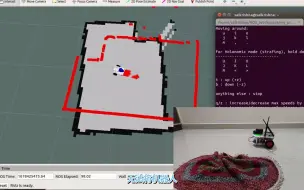
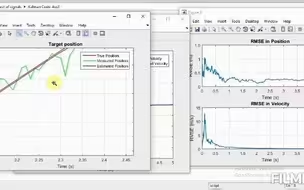
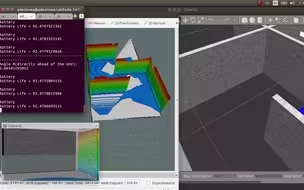
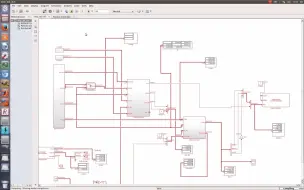
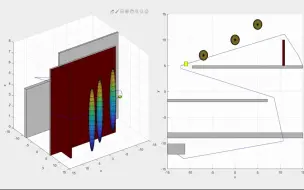
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
发布人
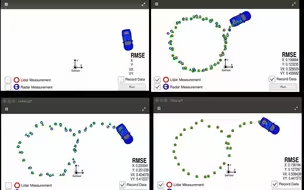
网络 一个基于扩展卡尔曼滤波器的本地化系统。扩展卡尔曼滤波器由基于视觉和基于传感器的位置估计提供。该算法在 ROS(机器人操作系统)环境中完成,图像处理(二维码检测)部分是用 Python 编写的。在我们通过 ROS 主题获得输出后,它们会在 MATLAB 上进行可视化。此外,Vicon Motion Capture System 用于保持无人机在 z 轴上的位置恒定
打开封面
下载高清视频
观看高清视频
视频下载器
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
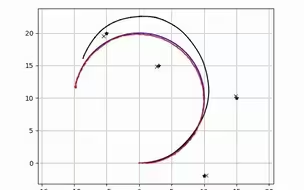
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
EKF定位RRT路径规划路径跟随机动悬停着陆UGV无人机
基于扩展卡尔曼滤波器ekf的 SLAM
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
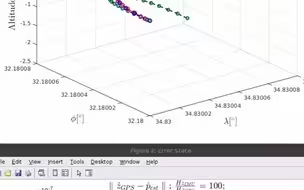
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
移动自主机器人中的传感器融合| IMU+车轮里程计
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
使用扩展卡尔曼滤波器在 MATLAB 中生成的 SLAM 模拟。该实现从激光扫描匹配和车轮里程计生成两个运动估计
电脑光枪 Gun4IR 补完篇 Wii 摄像头(组装)转IIC(I2C)接口 - 为啥总纠结(2024年9月)
EKF SLAM 在低噪声测量下使用来自机器人的模拟数据 EKF 状态由机器人姿态和地标位置组成。机器人能够成功地关闭循环并纠正地标估计位置
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
如何将一个温度传感器接到PLC上
维特智能蓝牙传感器假肢运动检测
如何快速判断传感器是NPN还是PNP?看完此视频秒懂,记得点赞收藏。
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
【博图技巧】手把手教你传感器模拟量转换与滤波
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
什么是差压变送器?
人体传感器的用法
电子工程师特辑:元器件、传感器、PCB设计经验分享
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
ESP32收官玩具-空间环境管理员
6自由度和9自由度传感器与Madgwick滤波器、MPU6050、HMC5883L(GY-86模块)融合
基于非线性模型预测控制的目标跟踪约束 NMPC matlab无人机算法
FSR402薄膜压力传感器详解(STM32)
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
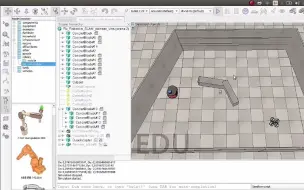
将 Matlab/Simulink 与 V-REP 接口,以轻松开发机器人平台基于传感器的控制算法
vex视觉传感器调试案例(代码开源)
关于空间环境管理员(?)你或许需要的背景知识~
用超8DIY数码传感器
汽车发动机传感器工作原理 -中文配音
使用 RRT 和非线性 MPC 的动态环境中的四旋翼运动规划和控制/matlab
HX711电子秤模块详解(STM32)
机器视觉必学——什么是飞拍?
ECCV '24 CVPPA | KAN你能看见吗? KAN网络与 Sentinel卫星结合实现 高效且可解释的作物田地分割