V
主页
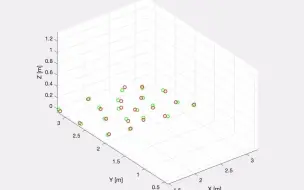
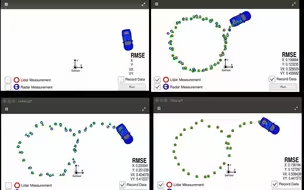
EKF SLAM 在低噪声测量下使用来自机器人的模拟数据 EKF 状态由机器人姿态和地标位置组成。机器人能够成功地关闭循环并纠正地标估计位置
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
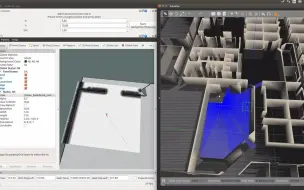
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
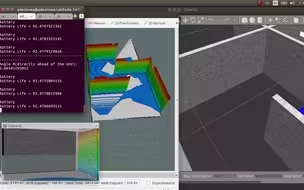
基于invariant EKF 的 SLAM 机器人状态估计
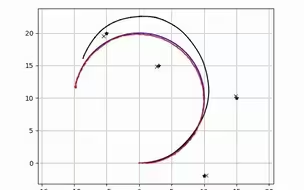
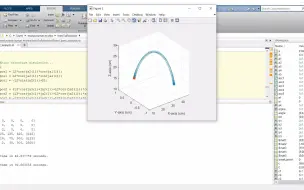
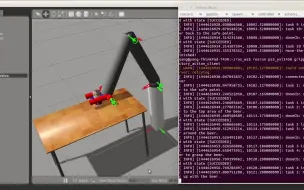
使用扩展卡尔曼滤波器在 MATLAB 中生成的 SLAM 模拟。该实现从激光扫描匹配和车轮里程计生成两个运动估计
使用粒子滤波器进行自我位置估计的操作检查算法
基于扩展卡尔曼滤波器ekf的 SLAM
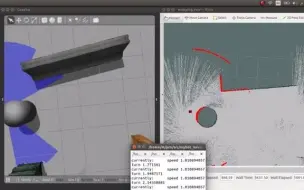
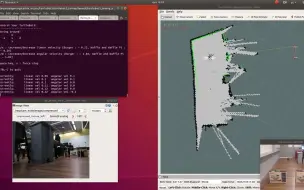
使用 ROS + Arduino + LIDAR 的 SLAM 自主机器人
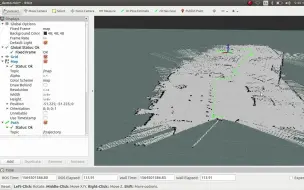
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
使用粒子滤波器实时估计车辆的位置和方向
无人机定位与导航
使用Realsense深度相机从点云进行目标检测和3D姿态估计
《车规级激光雷达OusterOS0-64》
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
移动自主机器人中的传感器融合| IMU+车轮里程计
使用贝叶斯滤波器 matlab 代码的测量估计
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
在Matlab和Simulink中模拟5自由度机器人
电池管理系统SOC估计算法资料优化目录2024.8.26
具有 ROS 和 Gazebo 的四轮机器人,用于 SLAM 和导航
【三维重建】近期进展:从UC-GS、实时高斯到Splatt3R、Spann3R(上)
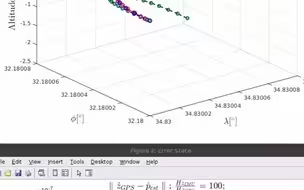
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
EKF定位RRT路径规划路径跟随机动悬停着陆UGV无人机
基于Matlab-Simmechanics的PID控制手臂机器人
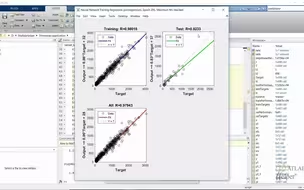
使用时间序列神经网络进行数据预测matlab算法程序
使用 ROS 在 Gazebo 中模拟抓取机器人
使用 MATLAB 进行 3DOF 并联机器人仿真 [Roll-Pitch-Heave]
RM 全阵容兵种导航建图避障仿真方案
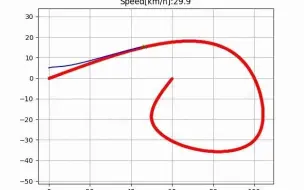
使用 Stanley 转向控制和 PID 速度控制的路径跟踪仿真
先跑为敬!软件测试彻底炸了!未来已寄..测试人该何去从!?
第 1 部分:MATLAB 中的蒙特卡罗模拟(教程)
使用 MATLAB/Simulink 模拟太阳能电池
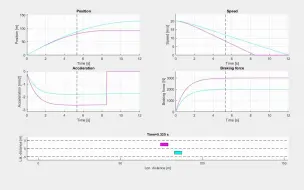
模拟和动画两辆车刹车到停止的位置、速度、加速度和制动力图
SLAM - 创建地图和自主导航演示
使用 RPLidar A1 在 ROS 中基于激光雷达的 SLAM 和路径跟踪
强推!这可能是B站最全的(Python+机器学习+深度学习)系列课程了,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
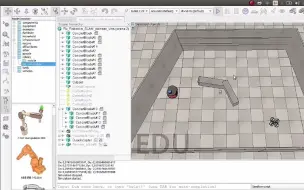
V-REP MATLAB 地图构建试验 SLAM:同时定位和建图