V
主页
京东 11.11 红包
华科、华为等发布!任意4D高斯分割
发布人
在XR / VR中,对真实世界的建模、理解和重建是至关重要的。最近,3D高斯泼溅( 3D-GS )方法在建模和理解3D场景方面取得了显著的成功。类似地,各种4D表示也展示了捕捉4D世界动态的能力。然而,目前针对4D表示中分割的研究较少。在本文中,我们提出了Segment Any 4D Gaussians ( SA4D ),这是第一个基于4D Gaussians来分割4D数字世界中任何事物的框架之一。在SA4D中,引入了一个有效的时序身份特征域来处理高斯漂移,具有从噪声和稀疏输入中学习精确身份特征的潜力。此外,还提出了一个4D分割细化过程来去除伪影。我们的SA4D在4D高斯中在几秒钟内实现了精确、高质量的分割,并显示了去除、重新着色、组成和渲染高质量任何遮挡的能力。 文章名称:【Segment Any 4D Gaussians】 文章链接:https://arxiv.org/html/2407.04504v1 项目主页:https://jsxzs.github.io/sa4d/
打开封面
下载高清视频
观看高清视频
视频下载器
AI终于让水浒角色说出了真心话
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
清华等开源! EmbodiedSAM:实时在线分割任意3D物体
【挑战全网系列】全网超强大模型FLUX+SDV4.9整合包超强封神版本 +全套SD超强模型插件整合包+Stablediffusion安装包+sd教程
日本先进院发布!GPU加速粒子滤波 6-Dof蒙特卡罗定位
开源!康奈尔大学等提出LSeg:语言驱动的图像语义分割
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
Flux危,SD3.5王者归来!官宣全部开源,个人可免费商用!AI绘画 AI绘图
Mochi1:最强开源AI视频模型?在线可玩儿Comfyui插件很快支持
北航小姐姐带你精读SLAM综述论文
IMU选型、标定误差分析、AHRS组合导航
7.4m/s相对速度自主规避,高效抵抗外部干扰!港大最新发布
哈工大发布|首个基于线特征的红外惯性里程计ETIO,性能超过了最先进的TIO!
ETH、斯坦福与微软联合开源数据集!大几何和时间变化下的三维点云配准的时空基准
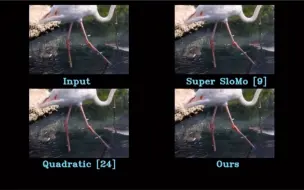
ECCV2020 | 华为最新插帧算法让视频如丝般顺滑
强推!这绝对是B站最全的(python+机器学习+深度学习)系列教程,草履虫都能学会,学不会你来锤爆我!人工智能/机器学习/深度学习/python/神经网络
上海交大最新开源|GNSS/INS/Camera融合导航库GICI-LIB
哈工大、北师大、清华开源!逼真的3DGS人体化身
密歇根大学开源”本体感觉不变的机器人状态估计”
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
加州大学开源!城市空间中具身智能的仿真平台
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
宾夕法尼亚团队发布! 从距离感知中学习城市局部风场
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
MIT发布!实时任务驱动的开集3D场景图
TUM与CMU联合开源! 可微无碰撞参数走廊
【开源】超强算法!动漫人脸自由切换,高分辨率视频风格化!南洋理工发布
逆天!免费用GPT-4o的网站,白嫖就是赚到!
精度提高了9倍,允许结合多视角深度信息的单目里程计!萨戈大发布
TUM&港中大新发布|无需任何3D真值,通过2D监督学习3D场景优先级!CVPR2023
这个数据集真强!地下隧道、不同照明等情况下,多机器人视觉SLAM!MIT等最新开源!
加大洛杉矶分校与浙大等联合开源”物理高斯:用于生成动力学的物理集成三维高斯”
英特尔最新开源|50%以上的降低,适用于稀疏情况下的深度估计!ICRA2023
超全超简单!一口气刷完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM、DBN等八大深度学习神经网络算法!真的比刷剧还爽!
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
ICRA2022|首尔大学发布基于物体的矩阵李群视觉惯性导航系统!
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
CVPR2022|亚马逊和UB即将开源EfficientVIS:端到端高效视频实例分割,无需任何数据关联!训练时间减少了15倍!
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案