V
主页
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
发布人
https://youtu.be/hMu1CT0Y-Js Learning robust autonomous navigation and locomotion for wheeled-legged robots Abstract Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we developed a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system’s robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond. https://www.science.org/doi/10.1126/scirobotics.adi9641
打开封面
下载高清视频
观看高清视频
视频下载器
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
人形机器人足底机械结构设计
WoCoCo:通过顺序接触学习全身人形机器人控制|2024【卡内基·梅隆大学】
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
MuJoCo 仿真 案例欣赏
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
通过优化理论指导设计双足以达到控制和任务的最优
幽灵机器人 Ghost Robotics - Vision 60
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
(ICRA 2024) Actor-Critic Model Predictive Control
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
人形机器人灵巧手臂最新成果
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
A Feasibility-Driven Approach to Control-Limited DDP
真牛!这个人形机器人吊打很多厂家的“产品”
移动机械臂让土木工程焕发第二春
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
(RA-L 23) Reactive Landing Controller for Quadruped Robots
Control is dead ?control+ learning才是未来
Learning whole-body manipulation for quadrupedal robot
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
ANYmal在金属、采矿厂进行机器人自主巡检
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
(Talk ICRA 2024) Actor-Critic Model Predictive Control
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
【通用】人形机器人RL策略Gazebo二次仿真框架
Safety-Critical Control of Autonomous Systems -Aaron Ames
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
Deep Compliant Control for Legged Robots
Panoptic-SLAM:使用全景分割的动态环境中的视觉 SLAM 代码已开源
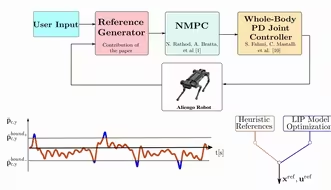
Optimization-Based Reference Generator for Nonlinear Model Predictive Control
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot