V
主页
通过优化理论指导设计双足以达到控制和任务的最优
发布人
https://www.youtube.com/watch?v=DEXYp0TsqRI Control- & Task-Aware Optimal Design of Actuation System for Legged Robots using Binary Integer Linear Programming Youngwoo Sim, Guillermo Colin, Joao Ramos Athletic robots demand a whole-body actuation system design that utilizes motors up to the boundaries of their performance. However, creating such robots poses challenges of integrating design principles and reasoning of practical design choices. This paper presents a design framework that guides designers to find optimal design choices to create an actuation system that can rapidly generate torques and velocities required to achieve a given set of tasks, by minimizing inertia and leveraging cooperation between actuators. The framework serves as an interactive tool for designers who are in charge of providing design rules and candidate components such as motors, reduction mechanism, and coupling mechanisms between actuators and joints. A binary integer linear optimization explores design combinations to find optimal components that can achieve a set of tasks. The framework is demonstrated with 200 optimal design studies of a biped with 5-degree-of-freedom (DoF) legs, focusing on the effect of achieving multiple tasks (walking, lifting), constraining the mass budget of all motors in the system and the use of coupling mechanisms. The result provides a comprehensive view of how design choices and rules affect reflected inertia, copper loss of motors, and force capability of optimal actuation systems. paper link: https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10494917
打开封面
下载高清视频
观看高清视频
视频下载器
写了一个人形机器人仿真,适用5或者6自由度的腿形
人形机器人足底机械结构设计
MuJoCo 仿真 案例欣赏
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
Tuning Legged Locomotion Controllers via Safe Bayesian Optimization
我可以接受机器人和人类共存,但是它们能不能看起来像机器人,这个冲着你笑的活体人类皮肤制成的笑脸,将来可能会被安装到人形机器人上
真牛!这个人形机器人吊打很多厂家的“产品”
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
你所见机器人般的我,是历经了九九八十一难的劫后余生
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
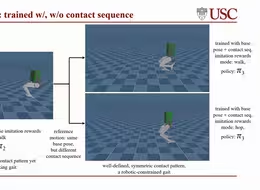
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
请问强化学习的损失是上升的怎么回事
移动机械臂底盘路径跟踪
Control is dead ?control+ learning才是未来
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
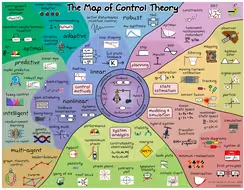
控制理论学习路线图
Whole-body MPC for highly redundant legged manipulators
人形机器人灵巧手臂最新成果
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
人形机器人 手指机械结构
【论文复现】移动机械臂协同控制(十) Gazebo无重力补偿
一家已有造血功能的人形机器人公司
双足机器人运动控制,步行和跑步之间的无缝过渡[搬]
Model and data, two essential ingredients for controlling legged robot
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
机器人挤奶,拒绝剥削!你好,它也好
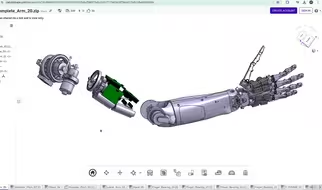
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
《起猛了?看见机器人在路上走了!》
(RA-L 23) Reactive Landing Controller for Quadruped Robots
人形机器人顶级学术会议,你投稿了吗?接下来几天分享相关会议论文吧哈哈哈哈哈哈
DTC: Deep Tracking Control 5
简直逆天!知乎2.7w赞!豆瓣9.5!最好的SCI科研论文写作指导书!看完再也不担心写paper
宇树H1 斯坦福 HumanPlus机器人 利用人类数据训练 通过强化学习 自主完成任务 | 叠衣服等 #人形机器人
两天连续工作18小时,服务现场800多位顾客,完成1000多项任务,成功率超过97%,Galbot做到了!
买了成品机器人,花了一周建模,准备上机
波士顿动力机器人 Atlas | 真正继承者 Nadia | 其他机器人靠边站