V
主页
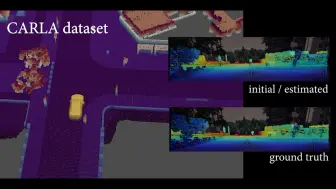
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
发布人
在这项工作中,我们提出了一种由单眼相机、六自由度IMU和单个未知超宽带(UWB)锚组成的紧密耦合融合方案,以实现精确和减少漂移的定位。具体而言,本文着重于将UWB传感器纳入现有的最先进视觉惯性系统。此前针对这一目标的研究使用单个最近的UWB距离数据来更新滑动窗口中的机器人位置(“位置聚焦”),并取得了令人鼓舞的结果。然而,这些方法忽略了1)UWB和相机传感器之间的时间偏移,以及2)两个连续关键帧之间的所有其他范围。我们的方法通过利用视觉惯性里程表管道中容易获得的传播信息,
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
5-1 特征点提取与匹配
【ICRA2021】用于自动驾驶汽车的基于 SRIF 的鲁棒 LiDAR-IMU 定位
1-1课程内容与预备知识
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
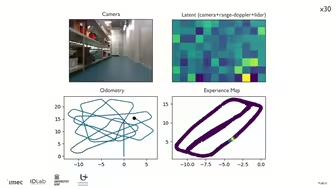
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】用于自动代客泊车的基于混合鸟瞰边缘的语义视觉 SLAM
【ICRA2021】协同视觉惯性里程计
1-4 Linux下的C++基础
【ICRA2021】用于特定领域重定位的同步多级描述符学习和语义分割
ORB_SLAM3实跑教程
【ICRA2021】半动态环境中的终身定位
【ICRA2021】快速高效地探索大型复杂环境
【ICRA2021】在线校准的高效多传感器辅助惯性导航
2-2 旋转矩阵
【ICRA2021】使用快速可见树的实时机器人路径规划
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
【ICRA2021】连接语义建筑信息模型和机器人:基于2D LiDAR的定位应用
AVP-SLAM- 停车场内自主车辆的语义视觉地图构建与定位
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】4081-一种集成波束形成映射的FastSLAM方法用于基于超声波的金属结构机器人检测
【ICRA2021】Kimera-Multi:分布式多机器人度量语义SLAM系统
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
【ICRA2021】紧密耦合激光雷达视觉惯性里程表的统一多模态地标跟踪
【ICRA2021】大规模环境下基于语义直方图的图形匹配实时多机器人全局定位
【ICRA2021】固态激光雷达的轻型三维定位和建图
2-5 实战环节
【ICRA2021】MaAST:使用语义转换器进行地图注意力以实现高效的视觉导航
【ICRA2021】面向阿克曼转向车辆的基于在线 RRT 的路径规划算法
可修改定位神器,老司机模拟器
【ICRA2021】Voxplan:一个使用符号距离函数子图的3D全局规划器
【ICRA2021】VelocityNet:点云序列中用于 3D 对象检测的运动驱动特征聚合
【ICRA2021】HyperMap:单目相机注册的压缩3D地图
【ICRA2021】MS*:一种用于多智能体同时多目标排序和路径查找的精确算法
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo