V
主页
【硬核课程】ORB-SLAM2答疑:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
1.2 如何快速学习开源代码?
1.4 ORB-SLAM2算法框架详解
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
为什么要学习ORB-SLAM2呢?
基于ros2-humble的lio-sam的建图自动导航仿真
【知识星球】SLAM星球漫游指南
ROS2用slam_toolbox建图,树莓派猪脑过载
2021年度盘点:十大最佳开源SLAM算法!
经验分享:我的SLAM学习之路-答疑交流
冒死上传(已离职)!世界公认的学神战术,学习一小时抵过十小时,让你效率暴张300%! 学习比游戏还爽个100倍2学会这套系统方法论,让你效率暴张300%
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
手把手带你入门SLAM
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
苏黎世皇家理工等发布!带闭环稠密神经SLAM
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
【直播回放】SLAM学习分享及交流心得-ORB-SLAM3
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
【六哥答疑】哪些相机比较适合做SLAM?
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
公开课 | 无人机实时及快速地图重建
手把手教你编译运行VINS代码
【原创】优秀开源代码盘点:稀疏视觉SLAM/SfM
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
【最新开源】单目RGB视频就可重建出会动的4D仙人掌玩具!
【六哥答疑】优秀的开源SLAM算法离落地还有多远?
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(下)
360度多层建筑定位和建图!
武汉大学博士生分享算法面向室内SLAM场景的点云超分辨率算法(上)
【SLAM前沿讲座】CMU|因子图与鲁棒感知
【六哥答疑】VSLAM与深度学习结合,是不是更容易出成果?
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
【直播回放】视觉惯性SLAM系统理论与实践(上)
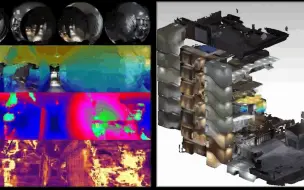
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
【直播回放】在读博士从头手写VIO代码的经历分享